
Historique des collimateurs de pilotage
D'après un article de René
Lami
L'histoire, celle qu'on écrit avec un grand H,
est très souvent controversée : selon les pays et les époques, chacun en
donne une version qui arrange son amour propre. Si l'on s'en tient à
l'histoire de l'aviation, elle n'échappe pas à la règle.
De même, pour l'historique du collimateur, il faut préciser ce que
c'est, ce que l'on y représente, et pour quel usage.
On peut lire dans un petit Larousse des années 50 :
Collimation (de collinéation) : action de donner à la vue une direction déterminée et
Collimateur : partie d'une lunette astronomique destinée à assurer la collimation.
Une autre édition 30 ans plus tard, oublie collimation, mais donne une meilleure définition :
Collimateur n. m. (lat. Savant collimare pour
collineare, viser) :
1. appareil d'optique permettant d'obtenir un faisceau de rayons
lumineux, parallèles.
2. Appareil de visée pour le tir.
La définition est meilleure, car elle dit que le
faisceau est composé de rayons lumineux PARALLELES, ce qui
implique une image apparaissant à l'infini. Pour un viseur de tir,
l'image est celle d'un réticule, en général une croix, donnant la
direction du tir.
L'invention de ce type de collimateur semble due au physicien français
Henri Chrétien, vers la fin de la guerre 14-18.
Depuis très longtemps, les avions (chasseurs en particulier) ont été
munis de ce viseur, où le réticule peut même être décalé pour faire
certaines corrections de tir. Il ne s'agit que d'un MOYEN de voir
" collimatées à l'infini " des images (en général lumineuses). Reste à
savoir, justement, quelles images doivent être représentées : simple
réticule de tir... ou un ensemble cohérent de données de vol conduisant
à une philosophie radicalement différente de celle des ordres de vol.
DONNEES DE VOL COLLIMATEES
Bien entendu, on a pensé à d'autres utilisations
que celle montrant la ligne de visée d'une lunette astronomique ou d'un
canon : dans la revue APNA (association des professionnels navigants de
l'aviation) de l'été 1962, Les pilotes y dénonçaient l'insuffisance et
les limites des instruments de bord classiques, et demandaient
l'utilisation du collimateur pour des informations de pilotage plus
précises. L'article exposait le principe à retenir, suggérant d'y
représenter une barre d'horizon à débattement angulaire naturel (ou "
1/1 ") et proposait d'utiliser l'angle d'attaque pour connaître la
portance mieux que par le paramètre indirect qu'est la vitesse. Pour
l'atterrissage sans visibilité, l'auteur de l'article préconisait un
système donnant à travers le pare-brise l'image artificielle de la piste
(ou de ses points caractéristiques).
D'autres en Angleterre et aux États-Unis, confrontés aux même
difficultés, présentaient peu après des instruments " head up ",
utilisant des collimateurs ou des systèmes para-visuels. Presque tous
donnaient l'image d'un directeur de vol, y mélangeant souvent un trop
grand nombre de paramètres classiques, et mettant surtout l'accent sur
l'accommodation de l'œil pour réduire les problèmes de transition...
(alors qu'en approche visuelle le pilote utilise sa planche de bord sans
trop de problèmes d'accommodation).
A l'époque, la technologie des collimateurs limitait les possibilités,
ce qui eût au moins le mérite de contenir les exigences (pas toujours
innocentes) des gens influents qui voulaient y représenter une planche
complète, au risque d'occulter toute vue extérieure.
André Turcat disait : " pour voir dehors, il faut commencer par nettoyer le pare-brise ". Il avait raison, mais seulement sur ce point, car lui militait pour l'atterrissage automatique " contrôlé " par une planche classique, donc sans collimateur qui, selon lui aurait souillé le pare-brise.
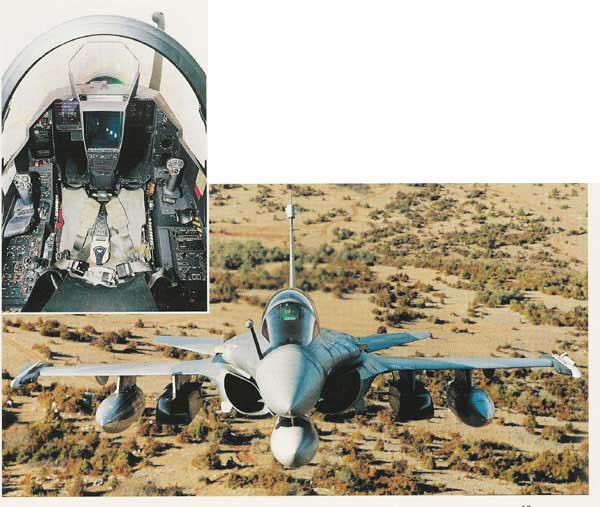
N'exagérons rien tout de même car s'il ne faut pas en effet mettre un arbre de Noël dans le pare-brise, le collimateur d'un Rafale Marine qui comporte pourtant, en mode approche et atterrissage, des relents d'instruments classiques, semble satisfaire ses utilisateurs qui peuvent avoir des besoins spécifiques, dus par exemple aux angles de cabré et de montée inhabituels pour un avion civil de transport.
Avant de revenir sur l'historique et la
figuration souhaitée, observons dès maintenant qu'il faut distinguer les
repères lumineux fixes sur le paysage (comme DOIT l'être un horizon 1/1
et ses repères de pente), et ceux liés à l'avion, qui en reproduisent
les mouvements sur le paysage QUELLE QUE SOIT LA SENSIBILITE de la barre
d'horizon, et occultent plus ou moins la vue extérieure.
Quand les Head Up étrangers ont été présentés au cours de réunions
IFALPA, ou OACI, où M. René Lami d'Air France représentait le SNPL,
celui-ci s'est disputé pendant des années avec les anglais du B.L.E.U.
(Blind Landing Experimental Unit) pour faire admettre la nécessité du
débattement 1/1. Eux prétendaient qu'au delà de 1/5°, les pilotes
feraient de " l'over control " (...ce qui revenait à dire que le
pilotage à vue était impossible).
Mais rappelez vous que nous sommes au milieu des années 60 et que la
technologie de l'époque limitait dramatiquement le champ de vision à
travers un collimateur.
C'est alors qu'en 1970, l'ingénieur en chef
KLOPFSTEIN, du Centre d'Essais en Vol de Brétigny se rapproche de René
Lami en ces termes :
" ...depuis quelques jours nous faisons voler un Mirage IIIA équipé
d'un viseur de combat qui, en fonction approche dispose d'un vecteur
Vitesse, d'un repère fixe... et d'une recopie de centrale. C'est donc la
première fois que nous disposons à la fois de V et d'un horizon à
l'échelle 1/1. La recopie d'horizon, bien que présentant encore quelques
défauts technologiques, est extrêmement agréable et, contrairement à des
bruits qui ont longtemps circulé, est parfaitement adaptée aux sens
humains.
Le fait qu'un horizon à l'échelle 1/1 (associé à un petit repère de
pente à 3°) soit très agréable en vol était de nature à confirmer votre
théorie sur l'image d'une piste, j'ai donc préféré attendre ces
résultats expérimentaux pour vous répondre.
Une idée extrêmement intéressante est le processus qui consiste à faire
effectuer la surveillance (le monitoring) du dispositif de guidage par
le PILOTE LUI-MEME, sans utiliser d'alarme, de flash, de Klaxon etc.
procédés parfois irremplaçable mais combien dangereux !
L'observation continue de la piste permettant à tout instant de
comparer, sans aucune fatigue intellectuelle, l'ILS et le second moyen
de guidage, justifie une étude sur simulateur, puis en vol. Je vais donc
essayer de monter un dispositif expérimental. "
Nous allons essayer de refléter ici l'évolution des conceptions, en France, au fur et à mesure que la technologie et les essais en vol permettaient d'en vérifier l'exactitude.
INSTRUMENTS DE PILOTAGE.
C'est leur insuffisance notoire qui a tout
déclenché et conduit à chercher autre chose. Dès l'origine du pilotage,
on a eu besoin d'instruments pour contrôler la sustentation et pour
conduire et guider les avions. Pour la sustentation, ou portance donnée
principalement par l'aile, on en est demeurés à l'époque héroïque où le
Capitaine Ferber ne la faisait dépendre que de la vitesse.
Pourtant, on a su très tôt qu'un avion présentait des " points de
fonctionnement " que l'on rencontre à des angles d'attaque (ou
incidences) qui sont bien précis, immuables et indépendants de la
vitesse.
Cette vitesse reste utile pour des
limitations de structure ou pour des vitesses sur la piste, mais c'est
affreusement " ringard " de continuer à l'utiliser pour calculer
l'incidence (qu'on sait maintenant calculer directement) à partir d'une
masse d'avion mal connue, et avec 1 g d'accélération (ce qui est presque
toujours faux).
Mais on persiste, en 2002.
En virage, on voyait défiler les repères capot
sur le paysage, et la direction se maintenait en les immobilisant, le
cap étant contrôlé par un compas magnétique dont les excursions ont été,
plus tard, assagies par gyroscope, mieux que par la viscosité d'un
liquide. Puisque l'avion vole dans les trois dimensions, on a dû aussi
assurer la navigation verticale, pour connaître l'altitude et sa
variation afin de déterminer, entre autres, les pentes de montée ou de
descente. On peut même parler de 4ème dimension pour la mesure du temps,
indispensable elle aussi.
Dès qu'on savait mesurer un paramètre, on le représentait sur un cadran
s'ajoutant aux autres sur la planche de bord. La disposition de cette
planche, anarchique à l'origine, a été améliorée (T basique), puis il y
eut la mode des instruments à lecture verticale, censée gagner de la
place, ou encore celle des instruments dits " intégrés ", et en fait
superposés, par regroupement de plusieurs indications sur un même
cadran. Mais fondamentalement, les principes restaient les mêmes.
Quand il s'est agi de voler sans visibilité, ces instruments ont dû être
complétés par d'autres, plus spécifiques : la " bille ", simple niveau,
donnant l'accélération transversale et " l'aiguille " donnant la vitesse
de virage (cadence).
Ces instruments primitifs ont dû rapidement être complétés, et
naturellement il a fallu prévoir des moyens de guidage. Pour l'approche
et l'atterrissage les gonios ont été plus tard remplacés par des ILS qui
fournit toujours, par déplacement d'aiguille dans un cadran de la
planche les écarts " localizer " avec l'axe de piste, ou " glide-path "
avec le plan de descente.
Mais avant d'en arriver là, il a fallu compléter aussi les instruments
de vol, la bille-aiguille ne suffisant plus.
L'HORIZON ARTIFICIEL
C'était un progrès considérable, malgré les
défauts des premiers appareils (précessions importantes par exemple).
Dans un écran apparaît une barre qu'un gyroscope maintient parallèle à
l'horizon, descend lorsque l'avion cabre et vice-versa. Le mouvement
vertical de la barre représente le tangage (assiette). Ce principe est
toujours utilisé, même dans les instrument électroniques actuels qui
sont seulement plus grands, dotés de belles couleurs, et sans parallaxe.
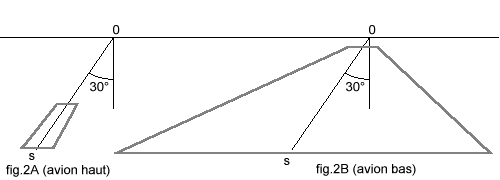
Lorsque le pilote regarde l'instrument, il voit des déplacements
LINEAIRES d'une barre, vue à une distance de l'ordre de 80 cm et pas
du tout à sa place, tandis que l'horizon, LE VRAI, est vu beaucoup plus
haut, dans le pare-brise, et ses déplacements sont ANGULAIRES,
inverses, mais de même valeur que ceux de l'avion, d'où la revendication
1/1 (ou plutôt -1/1).
L'agrandissement du cadran a permis d'accroître la précision de lecture,
mais la conversion d'un déplacement vertical de la barre d'horizon en un
angle vu de l'œil du pilote est illusoire, car la distance d'observation
varie et l'angle trouvé (outre qu'il est 5 à 17 fois plus petit selon
l'ancienneté de l'appareil), n'a rien à voir avec l'angle que l'on doit
mesurer : il s'agit de montrer des angles et on fournit des millimètres
!
Le collimateur est un moyen de donner des angles en vraie grandeur.
ATTERRISSAGE ET BONNE VISIBILITE
Considérons le cas général d'un avion qui s'aligne sur l'axe de piste avant son atterrissage. Un TB10 comme un B747.
UNE REALITE AVEUGLANTE : la quasi totalité des atterrissages, en ce qui concerne la phase finale tout du moins, s'effectue " à vue " et manuellement.


Les atterrissages automatiques ou semi-automatiques (manuels guidés par un directeur de vol) ne sont qu'une infime minorité de la totalité de ceux pratiqués dans le monde.
CONCLUSION : l'information visuelle seule contient les données de guidage essentielles pour atterrir.
Encore faut-il analyser lesquelles et pourquoi. C'est cela l'objet de VOTRE travail.
Quand la piste utilisée dispose d'un guidage visuel de pente (VASI ou PAPI) ou radio (glide-path), ce guidage pallie une imprécision notoire de l'information visuelle (malgré une pente et une origine au sol fixées une bonne fois pour toutes). Mais dans les cas les plus nombreux où ces aides n'existent pas, l'expérience quotidienne montre que l'on peut tout de même s'en passer. Cette expérience démontre aussi que le pilote se situe visuellement par rapport à l'axe de piste sans aucune difficulté et avec d'autant plus de précision qu'il est près de la piste : il sait à quelques centimètres près (ou décimètres pour un très gros avion), où il pose sa roue de nez et seules des conditions telles que le vent de travers, par exemple, peuvent le gêner pour se maintenir sur la ligne axiale (une telle précision est bien entendu, inutile pendant l'approche).
POURQUOI ?
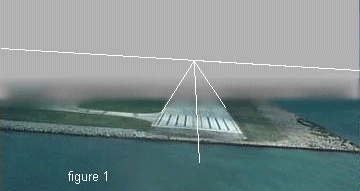
La raison est d'une simplicité désarmante : la trace au sol du plan passant par l'axe de la piste est une ligne qui converge vers le " point de fuite " à l'horizon (fig. 1), tandis que la trace au sol du plan vertical contenant l'observateur dans l'avion est une verticale issue du même point de fuite (terre supposée plate et horizontale à l'échelle d'une approche).
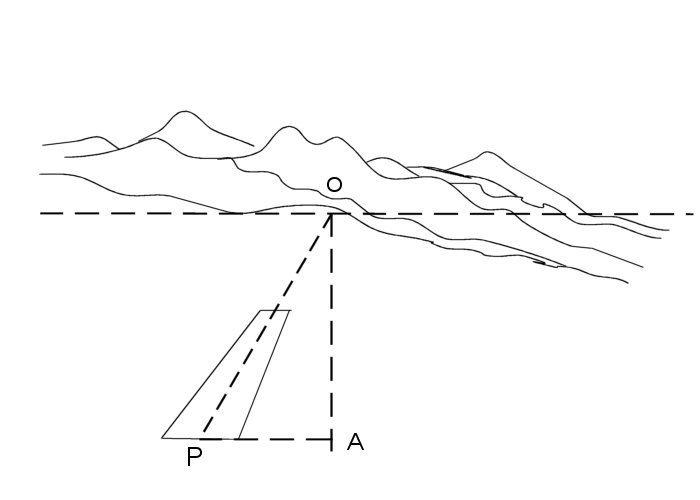
Figure1 : sans les limites de la piste dont les bords sont
horizontaux, et sans les pointillés, l'horizon apparent peut se
confondre avec la pente générale du sol. L'avion est aligné quand PO se
confond avec AO.
On est donc aligné sur un axe au sol quand on le voit perpendiculairement à l'horizon.
EXPERIENCE : placez-vous sur un sol carrelé et regardez devant vous en direction d'une ligne de joints. La ligne où vous êtes est la seule où vous " sentez " votre verticale. Toutes les autres semblent inclinées et vous les verrez tourner en faisant un écart latéral, dont le sens et la valeur vous seront évidents.
Autre évidence : l'inclinaison apparente croît avec l'écart. Inversement, à même inclinaison l'écart réel est d'autant plus faible que l'on est près. Cela explique l'accroissement de précision du guidage visuel à l'approche d'une piste, sans devenir hypersensible (tandis que les signaux de l'ILS doivent être atténués). Parce que la largeur de la piste montre la grandeur de l'écart à corriger (les " fenêtres ILS " deviennent inutiles).
De même en avion quand vous voyez la piste : aucune difficulté pour vous situer par rapport à son axe... pourvu qu'il existe une référence d'horizon ! (ou de verticale réelle car celle que vous ressentez dépend de l'inclinaison de l'avion).
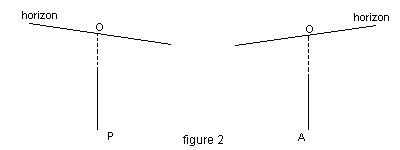
Si le pilote ne voyait QUE l'axe en traits pleins (et non pas les pointillés), il pourrait se croire aligné dans les deux cas car l'axe, lui, semble dans la direction de sa verticale apparente, donc perpendiculaire à son plancher, même en virage. Si on lui rétablit l'horizon, il devient évident qu'à gauche il est à gauche et qu'à droite il est à droite.
Dans la nature c'est rarement la verticale qui sert de référence, mais l'horizon. Dans un collimateur, on pourrait représenter une ligne verticale, mais à l'alignement, elle se superposerait à l'axe de piste, ce qui gênerait la vue de l'endroit le plus important.

CONCLUSION : Imitons la nature, avec une référence d'horizon qui restera en coïncidence avec l'horizon vrai, et donnons aussi une image artificielle de la piste coïncidant avec la vraie.
Le guidage visuel vers l'axe est donc excellent, mais il est nettement moins bon en ce qui concerne la pente. A vue, on utilise des moyens tels que la notion " pifométrique " de distance angulaire du point visé sous l'horizon, ou l'apparence plus ou moins aplatie de la piste (ou la convergence de ses bords quand le brouillard en cache une partie).
Ou la sensation de voir sur la piste un point
qui semble grossir (les autres semblent s'en éloigner) : c'est une sorte
de vecteur-vitesse sol mais dont on ignore la pente.
Aucun pilote n'a besoin du " localizer " pour s'aligner à vue, mais il
s'aidera volontiers d'un glide pour contrôler sa pente. Malheureusement,
même sur des aéroports à très fort trafic et dans les pays " riches ",
la piste en service ne dispose pas toujours de " glide-path " et les
pilotes en sont réduits aux moyens primitifs dont on a parlé plus haut,
ce qui pourrait bien inquiéter bon nombre de passager s'il en étaient
informés.
SOLUTION : si, dans un collimateur ou tout autre système qui permettrait d'obtenir le même résultat (hologramme ?), on peut représenter une ligne d'horizon qui reste en coïncidence avec la vraie, rien n'est plus simple que de placer au dessous un repère à la valeur de la " pente géographique " choisie (ajustable de préférence, car elle peut varier selon les pistes).
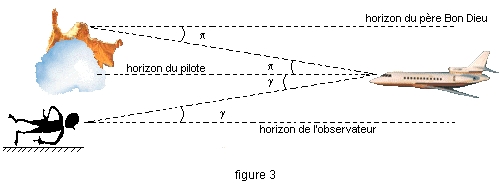
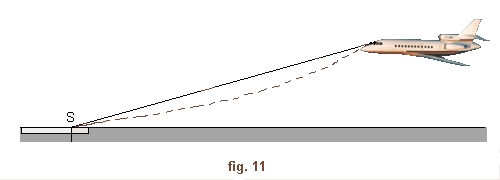
Pour le père bon Dieu, dans son fauteuil de nuages, comme pour le pilote ou pour l'observateur à plat-ventre, les plans de leurs horizons respectifs sont représentés par trois droites parallèles et horizontales. Si Dieu abaisse son regard jusqu'au pilote, il le verra à un angle pi au dessous de son divin horizon, et si le pilote n'était pas un mécréant, il verrait Dieu à ce même angle pi au dessus de son propre horizon. De même, si à un moment donné, l'observateur au sol aperçoit l'avion à un angle gamma au dessus de son horizon, le pilote pourrait voir l'observateur au même moment au même angle gamma au dessous de son horizon, car bien avant les mathématiques modernes on savait déjà que les alternes-internes sont égaux.
Si le pilote dispose dans un collimateur d'un
repère ajusté à l'angle gamma, il " promène " avec lui sa pente
sélectée, mais cela ne préjuge en rien de sa trajectoire future (qui
peut monter, rester horizontale, ou descendre sous une pente quelconque,
y compris gamma), mais il pourra constamment comparer la " pente
géographique " d'un point extérieur par rapport à cette pente sélectée.
On peut donc contrôler CONSTAMMENT sa pente d'approche :
- Point visé au dessus du repère : pente trop faible
- Point visé à hauteur du repère : pente correcte
- Point visé au dessous du repère : pente trop forte
Cela résout les problèmes d'imprécision du
contrôle de pente par " bonne " visibilité, mais où l'horizon apparent
(naturel) est rarement en coïncidence exacte avec le vrai (terrain en
pente, brume).
En outre, l'horizon reste nécessaire pour donner la référence
d'inclinaison relative de l'axe de piste, indispensable pour s'y
aligner.
ATTERRISSAGE EN VISIBILITE REDUITE OU NULLE
Si on " rendait ses yeux au pilote " en lui montrant une piste synthétique avec l'horizon que l'on vient de décrire, le problème serait résolu, car on utiliserait la MEME METHODE aux instruments et à vue, celle-ci étant rendue beaucoup plus sûre par le contrôle continu de la pente, sans recours inutile à un directeur de vol. C'EST DEMONTRE DEPUIS PLUS D'UN QUART DE SIECLE ! ! !
L'ensemble des
rapports de vol et évaluations des collimateurs Klopfstein, de 1972
à 1980
Et toujours contré sous des prétextes fallacieux
(par exemple fiabilité... alors que toutes les informations utilisées
dans un HUD sont déjà disponibles dans les systèmes avion).
Rendons hommage à ceux qui ont corrigé les insuffisances des instruments
par des astuces de pilotage (du genre pente en % = vario en pieds minute
divisé par badin en nœuds, bien utiles mais que certains apparenteraient
à des recettes de bonne femme ! ! !)
Mais me direz-vous, il y a le directeur de vol ! Parlons-en !
DIRECTEUR DE VOL
Ce n'est PAS un instrument de contrôle du
vol, mais un semi pilote automatique, dont le pilote humain remplace la
partie motrice, en agissant sur ses commandes de roulis et de tangage de
façon à ramener et maintenir les symboles du cadran à zéro. C'est là une
conception en contradiction totale avec l'utilisation directe des
paramètres essentielles de vol et de guidage, qu'il s'agit de choisir et
de rendre utilisable commodément.
Ces symboles de l'instrument ont des noms qui en disent long : pour ne
pas froisser la susceptibilité du pilote qui se croit encore " dans la
boucle ", on les appelle " barres de tendance " en France, mais chez les
anglo-saxons (qui n'ont pas les mêmes complexes) : " command bars ", ce
que nos militaires traduisent par : " les ordres ".
Il s'agit d'un instrument vraiment intégré (et non superposé) dont le
calculateur se charge de la partie " noble " de l'opération, en
équilibrant les paramètres en cause, dont les gains et les limitations
sont réglables individuellement pour aboutir à un ordre simple à
exécuter (j'allais dire bête).
Vous voyez comme les " bons apôtres " de l'automatisation sont soucieux
d'alléger notre charge de travail... Malheureusement, mieux le pilote
obéit aux ordres, moins il peut se concentrer sur ce qui DOIT RESTER son
travail, c'est à dire le contrôle des paramètres de base encore à sa
disposition : vitesse, hauteur, vario, écarts localizer et glide... et
guetter l'apparition de la piste pour " changer de mentalité " en
reprenant la méthode de pilotage visuel (quand c'est possible). Un
pilote automatique obéirait encore mieux aux ordres de ce calculateur,
mais son contrôle par des instruments classiques n'en serait pas
amélioré pour autant.
ATTERRISSAGE AUTOMATIQUE
Venons-en à cet auto-land, dont on continue à
nous rebattre les oreilles, tant il est vrai que les progrès
technologiques peuvent laisser croire aux décideurs que leur but est
enfin à portée de main.
Au début des années 50, Air France louait une pleine page de publicité
du " Figaro " pour annoncer que, " à la pointe du progrès ", elle menait
une campagne d'essais d'atterrissages automatiques avec ses
Constellation 749, alors équipés du pilote automatique PB10... (ceux qui
connaissent apprécieront, mais on voulait commencer).
En 1967 la revue " Air et Cosmos " écrivait : " pour les
constructeurs et certaines compagnies aériennes, LE BUT A ATTEINDRE EST
L'AUTOMATISME COMPLET EN SERVICE COURANT. "
Autrement dit, on créait sciemment une confusion entre le but et le
moyen, alors qu'il ne s'agit QUEL QUE SOIT LE MOYEN, que de conduire un
vol du décollage à l'atterrissage, en sécurité, dans toutes les
conditions de VISIBILITE (et seulement de visibilité, car les autres
interdictions demeurent : piste verglacée ou inondée, avion accidenté
sur la seule piste en service, limitation de vent de travers etc.).
Le but du pilote n'est pas celui du gestionnaire. Du mauvais gestionnaire.
Toujours vers 1967, la BEA commençait
l'exploitation de son " trident ", où tout était triplé (jusqu'aux
gouvernes) et débutait une expérimentation visant, pour 1971-72, une
certification par visibilité de 100 m pour l'atterrissage et de 50 m
pour le décollage. En 1969, la dépense pour ces essais était déjà de 33
millions de dollars, et l'on en prévoyait encore 3,5 millions par an
jusqu'à la certification espérée.
De leur côté, les américains y travaillaient aussi : Douglas sur son
DC9-30, Lockheed sur le L1011, plus discrètement, et ils commençaient à
essayer des collimateurs.
BILAN : Un pilote automatique dit " auto-land "
:
· À ma connaissance ne fait toujours pas le décollage,
· N'est pas utilisable quand la piste en service exige d'effectuer une
approche finale en virage,
· Exige une piste équipée d'un ILS complet et de catégorie adéquate,
· Reste soumis à des minima de certification, auxquels le pilote humain
n'est pas autorisé, avec les instruments qu'on lui a laissé dans le seul
but de garder un lampiste " responsable ".
· N'a comme seul recours (en cas de panne d'un élément à bord ou au sol)
que la possibilité théorique de remise de gaz et suppose un aéroport
praticable " à portée de carburant ".
· Coûte très cher ... mais tout se passe comme si l'on cherchait à
justifier des marchés importants.
· Demande un entraînement particulier des pilotes, ce qui nuit à celui
qu'il faut pratiquer manuellement en ligne, surtout sur long courrier.
Est-ce un point positif que d'avoir abusé le public en le persuadant que l'atterrissage est assuré si l'on dispose d'un pilote automatique ?
RESPONSABILITE DU PILOTE
Vous allez me dire : " alors vous êtes contre le
pilote automatique " ?
Mais non, tant qu'il s'agit de tâches fastidieuses ou répétitives, ou
qui ne risquent pas de compromettre la sécurité en cas de défaillance.
Mais contre l'auto-land, en effet, absolument contre, dans l'état actuel
: il est inadmissible qu'un pilote puisse abdiquer sa responsabilité en
laissant le robot continuer un atterrissage en dessous des " minima de
la planche ", c'est à dire ceux auxquels il est autorisé, lui, avec ses
instruments inadéquats.
En conservant ces instruments basés sur des principes désuets, on assiste à une superbe démonstration par l'absurde que le pilote humain ne peut pas faire aussi bien que l'automate. Les compagnies aériennes ayant très tôt choisi le chemin de l'automatisme, s'opposaient à la doctrine des navigants qui osaient remettre en cause les instruments de bord traditionnels (dont il fallait bien continuer à se servir), et elles contraient le développement des nouvelles informations vues à l'infini dans le pare-brise. Il fallait donc trouver un constructeur.
Il y a 35 ans, les écrans à haute brillance n'existaient pas, la technologie des servomécanismes était limitée, rendant les dimensions des collimateurs difficilement compatibles avec leur installation dans les cockpits, les champs de vision étaient restreints... et dès le début les oppositions se sont manifestées sournoisement quand ce n'était pas ouvertement.
À vrai dire, les arguments contre ne manquaient pas, et ils étaient parfois très pertinents, mais il fallait bien commencer.
Il y eut d'abord le CSF 190, monté sur un
simulateur de Constellation en 1965, puis le type 191, monté sur une
caravelle d'essais à Brétigny.
Les pilotes de ligne de l'époque pouvaient voler sur cet avion et se
faire ainsi une idée des possibilités de l'instrument, qu'il n 'était
évidemment pas question d'utiliser en ligne à ce stade, mais ça avançait
doucement, car il y avait beaucoup de défauts ou d'insuffisances à
corriger, notamment :
Champ de vision trop étroit, Représentation de diverses échelles
(vitesse, altitude, cap) qui normalement n'ont rien à faire dans un
collimateur,
Utilisation d'un directeur de vol... faute de mieux. Ce qui a permis de
vérifier que la transition n'est pas qu'une affaire d'accommodation de
l'œil, mais aussi de modification de processus mental.
Un an plus tard, CSF sortait le type 193. Un
progrès considérable était réalisé, non seulement sur la fiabilité, mais
aussi sur la réduction de taille : cela a permis d'installer l'appareil
en plafond et ainsi de raccourcir la distance optique de l'œil à la
lentille. On obtenait enfin le débattement 1/1 de l'horizon.
Ce 193 donna naissance au 193M qui servit à la certification du Mercure
en Catégorie IIIA, puis du 193V qui servit aux essais du vecteur
vitesse.
ESSAIS AIR FRANCE
FIN 1969, Air France commençait une expérimentation sur caravelle, avec 30 pilotes qui ont exécuté environ 300 approches enregistrées, ce qui a conduit à une certification Cat. II obtenue le 15 Octobre 1970.
La dégradation par rapport à la
certification Cat. IIIA d'Air Inter pour un même collimateur peut
s'expliquer par des sources (gyros en particulier) différentes, et
l'utilisation d'un autre pilote automatique, sur un autre type d'avion.
Les essais Air France ont permis de vérifier que la transition n'est pas
tant une affaire d'accommodation de l'œil, que de modification de
processus mental entre le pilotage à vue et le pilotage dit " aux
instruments ", qui restaient de type classiques dans le collimateur.
Ces essais ont mis aussi cruellement en évidence les défauts des
horizons de l'avion : avec la sensibilité 1/1, des " sauts " de ½ degré
" crevaient les yeux " (c'est le diamètre apparent de la lune et du
soleil , ce qui semble énorme à l'horizon). Or quand il s'agit de se
référer à un angle de pente inférieur à 3°, on ne peut plus tolérer une
imprécision qui dépassait souvent le degré.
Ainsi on n'a pas pu exploiter le principal avantage de l'horizon 1/1, à
savoir l'observation continue de la pente géographique par rapport à un
repère (seuil de piste).
LA REVOLUTION DU PILOTAGE
on était donc principalement arrêtes par
l'obligation, avec ou sans visibilité extérieure, de toujours utiliser
le même principes désuets de pilotage, avec des instruments
insuffisants.
C'est alors que l'Ingénieur en Chef Gilbert Klopfstein, pilote d'essais
et professeur à Sup'Aéro, vint faire une causerie à Air France, sur une
nouvelle méthode de pilotage. Bien sûr, il était au courant de ce qui
avait été fait auparavant, mais pendant ce temps là, il avait fait une
curieuse expérience.
Un jour où il neigeait et qu'il atterrissait en Mirage III, il vit
grandeur nature, le " vecteur vitesse " inverse, c'est à dire le vent
relatif, matérialisé par les flocons de neige, qui semblaient tous
surgir d'un même point, le point d'atterrissage visé.
C'était le déclic, comme pour Newton avec sa pomme.
Rentré chez lui, il construisit de ses mains un collimateur simplifié
asservi à une sonde d'incidence (girouette), ce qui permettait de
reproduire ce que la neige lui avait montré. Bien sûr, ce n'était pas
tout à fait aussi simple, il fallait trouver un emplacement correct sur
l'avion, déterminer la loi de correction d'installation, et filtrer le
signal pour obtenir une reproduction fidèle et sans oscillation de
l'angle d'attaque.
Il a pu ainsi démontrer que la précision pouvait atteindre le 1/5è de degré pour une sonde en flanc de fuselage, et le 1/10è de degré si on peut l'installer devant, au bout d'une perche. Quand on sait qu'aux vitesses d'approche de nos avions une variation de 1 degré équivaut environ à 5 kt, on découvre que la vitesse peut se contrôler à moins d'un nœud près !
PILOTAGE DE TRAJECTOIRE

Restait à trouver comment le pilote peut exploiter cet angle (mesuré dans le plan de symétrie) qui, comme tout autre, a deux côtés :
L'un qui sert d'origine est la " référence fuselage " (dont la figuration abstraite est la maquette dans un horizon de planche et qui, dans un collimateur, équivaudrait à un réticule de tir) : c'est le mauvais côté de l'angle, que l'on s'obstine toujours à piloter, et pourtant sa direction n'a rien à voir avec celle qui est suivie.
L'autre, le " bon côté ", est tout simplement la trajectoire de l'avion dans la masse d'air, c'est-à-dire la direction exactement opposée à celle de la gerbe de flocons de neige.
Grâce à son filtrage, Gilbert Klopfstein a démontré que si l'on donne dans un collimateur l'image de ce vecteur vitesse, on la commande avec le manche aussi précisément que celle de l 'axe avion, mais seul le vecteur-vitesse donne une direction utile : celle où va l'avion. Il suffit alors de viser avec ce vecteur vitesse par exemple le seuil de piste pour y atterrir, théoriquement sans vent... D'où :
POLEMIQUE
Naturellement les éternels opposants ont
déclenché une polémique, en prétendant qu'il fallait un vecteur vitesse
sol, ce qu'on ne savait pas faire à l'époque (depuis on sait), et non
pas air, ce qui leur permettait de tout bloquer.
Première remarque : AIR ou SOL, ni l'un ni l'autre ne donne la valeur de
la pente actuelle par rapport au point visé (la " pente géographique ").
Deuxième remarque : le " juge de paix " est la position du point visé
par rapport au repère de " pente géographique " asservi à l'horizon 1/1.
Si la " cible " est au dessus, la pente est trop plate et il faut placer
le vecteur vitesse, qu'il soit AIR ou SOL, plus haut, de façon à venir
sur la pente sélectée, et réciproquement si elle était au dessous du
repère de pente sélectée.
Ces opposants n'avaient pas compris, ou feignaient de ne pas comprendre, que la méthode consiste à " piloter la pente " en s'aidant du vecteur vitesse, et non à maintenir ce dernier sur le point visé : peu importe qu'il y ait ou non une légère dérive verticale à corriger (voir figure). Ils en restaient toujours à leur idée fixe de pilotes à QI si faible qu'il leur faut une sorte de " directeur de pente ".
ANGLE D'ATTAQUE
La vitesse étant avantageusement remplacée par
l'incidence ( ou angle d'attaque selon la référence), encore faut il
être capable de maintenir un angle caractéristique, de même que l'on
doit tenir une vitesse choisie. Le " mauvais côté " a tout de même un "
bon côté " (au figuré).
En effet, on peut le remplacer par un repère décalé vers le bas de la
valeur sélectée (comme un " bug " sur un cadran de Badin) pour obtenir
le " fixe " de référence avion.
Si le repère est en face du vecteur-vitesse, on est à l'incidence
choisie ; au dessus, on vole à un angle trop fort (trop cabré, donc
vitesse trop faible) ; et vice versa. On pourra se fixer des "
incidences de référence " comme on se fixait des Vréf, mais ici les
angles seront toujours indépendants de la masse et de l'accélération.
GRADIENTS DE VENT : WINDSHEAR
Il s'agit d'un phénomène lié à la composante de vent le long de la trajectoire (vent effectif ou Veff.) pendant la descente. Il est inéluctable car le vent est ralenti par frottement sur le sol. Il peut y avoir un simple glissement d'air les unes sur les autres, d'où le nom anglais que l'on peut traduire par " cisaillement de vent ". Mais il peut s'agir aussi de rotation qui fait également varier le vent effectif.
Prenons l'exemple simple d'un avion débutant son
approche à la vitesse de 130 kt avec un Veff de -30 kt : sa vitesse-sol
n'est plus que de 10 kt.
Si le pilote ne reçoit que l'indication d'un vent au sol faible, il n'a
pas de raison particulière de s'inquiéter. Cependant, par inertie, son
avion tend à garder sa vitesse sol et, en descendant, sa vitesse
aérodynamique va augmenter et sa trajectoire s'incurver ;
mais s'il ne dispose que des instruments
classiques, il n'aura aucune indication directe de sa trajectoire et ne
sera averti que par la régression du " Badin " et ensuite par son vario
de plus en plus négatif , même s'il a maintenu son " assiette "
constante.
La régression de vitesse (badin) sera d'autant plus forte qu'il va
atteindre plus rapidement les couches de vent les plus faibles en
laissant s'infléchir sa trajectoire : l'effet est cumulatif, et il est
aggravé si le pilote (humain ou automatique) prend une " assiette " plus
à piquer pour récupérer le " badin ".
Par contre, cet effet cumulatif ne peut pas se produire si l'on maintient directement la trajectoire soit manuellement avec un collimateur, soit avec un pilote automatique de trajectoire. De plus, dans son collimateur, le pilote verra son " fixe avion " passer au dessus du vecteur vitesse, ce qui lui signale un angle d'attaque en augmentation et son réflexe sera d'augmenter la puissance.
Ces gradients son souvent meurtriers et tout moyen simple permettant d'en limiter les effets mérite d'être encouragé.
Extrait d'un bulletin de sécurité des
vols d'une grande compagnie Française
CONDUITE MOTEUR
C'est encore Gilbert Klopfstein qui a posé et résolu le problème, qui est le suivant : Donner au pilote la représentation CONTINUE de son bilan d'énergie afin qu'il puisse l'adapter immédiatement et de façon intuitive au sens et à la valeur de l'accélération résultante, quelles que soient les variations de pente ou d'incidence.
Sa solution consiste à revenir aux sources, et puisqu'on savait piloter la pente en la représentant dans un collimateur, le bilan d'énergie devait également y figurer sous forme d'une pente. Il a donc transformé l'énergie totale en une " pente totale " disponible à tout moment, ou ajustable par les manettes de gaz.
On sait que l 'énergie potentielle est le produit du poids mg par la hauteur H dont on peut descendre, soit :
Ep = mgH
et que l'énergie cinétique est
Ec = ½ mV².
L'énergie totale est la somme des deux :
Et = Ep + Ec Et = mgH + ½ mV²
En divisant par le poids (terme constant mg), il reste :
Et / mg = H + V²/2g
si nous parlons " hauteur ", comme pour le premier terme à droite de l'égalité, on peut dire pour celui à gauche " hauteur totale " et considérer, en différentiant, dans un petit intervalle de temps dt, une variation de hauteur totale dHt, de hauteur dH, et de vitesse.
DHt /dt = dH / dt + VdV /gdt
On peut dire que la vitesse verticale totale VZt est la somme de la variation de hauteur (vario) et du dernier terme où dV/dt est la valeur A de l'accélération sur la trajectoire. Ce dernier terme est donc le produit de la vitesse par le rapport de l'accélération sur la trajectoire à celle de la pesanteur (V x A/g).
VZt = Vz + V x A/g
VZt est la variation de hauteur totale. Pour obtenir des pentes, on divise les 3 termes par la vitesse, et il reste :
VZt / V = VZ / V + A / g
Le premier est la " pente totale ", qui est la
somme d'une pente issue de l'énergie potentielle (rapport vario/vitesse),
et de la pente issue de l'énergie cinétique.
La pente totale est l'angle ayant pour origine l'horizon, calculé comme
on vient de le voir, et on y place son symbole.
Le vecteur vitesse a une pente Vz/V, et la différence entre les deux est
l'accélération, traduite en changement de pente qu'il faudrait faire
pour l'annuler.
Pour diminuer l'incidence, en gardant la pente, on agira sur les
manettes pour placer la pente totale au dessus du vecteur vitesse, ce
qui fait accélérer et vice-versa.
Pour garder l'incidence et la pente choisie, on agit sur les manettes
pour garder la pente totale en face du vecteur vitesse.
Pour garder l'incidence sans modifier la puissance, on place simplement
le vecteur vitesse sur la pente totale, qui est la valeur de pente
possible pour le réglage moteur actuel. D'où le nom, impropre pour les
puristes, de " potentielle " car, si c'est bien celle qu'on pourrait
prendre, ce n'est malheureusement pas celle qui est issue de l'énergie
potentielle.
REPERE DE ROUTE
Bien sûr, en pilotage à vue sans collimateur, l'encadrement du pare-brise est souvent le seul moyen d'avoir une vague idée de l'axe de l'avion (les repères capot d'antan ont disparu).
Un collimateur peut donner cet axe avec précision, mais de même que dans le plan vertical il vaut mieux piloter le vecteur vitesse et non l'assiette, on peut piloter la route et non plus le cap, grâce à un repère décalé de la dérive, ce que des centrales à inertie ou des GPS peuvent donner directement.
LES NOUVEAUX COLLIMATEURS
Ce sont ceux qui utilisent ce pilotage nouveau, et non plus le pilotage traditionnel par des instruments de principe périmé, fussent-ils représentés dans un collimateur, comme c'est le cas de certains appareils bien plus récents dont on parlera plus loin.
LE CV91
En attendant de pouvoir figurer la piste, un premier appareil simplifié, le CV91 a été construit dans un but de démontrer les possibilités du " nouveau pilotage " (en tangage seulement). Il a été monté pour essais sur un DC8 de l'UTA et sur un B747 d'Air France, mais pour ce dernier en tous cas, et à ma connaissance aucune instruction n'a été dispensée pour son utilisation, même à un groupe restreint de pilotes et aucun programme d'expérimentation n'a été réalisé. Les premiers essais sérieux de pilotage au vecteur vitesse ont été réalisés au CEV sur Mirage IIIB par une trentaine de pilotes ayant réalisé plus de 400 atterrissages, dont 30 de nuit, de façon répétitive, avec des écarts de vitesse (enregistrée, mais non représentée dans le collimateur) inférieurs à quelques nœuds, une dispersion de Vz à l'impact dérisoire, et une dispersion de toucher des roues de l'ordre de 100 mètres.
Grâce à l'ingénieur général Jean Forestier, un
CV91 a été monté sur le Nord 262 n°55, l'avion de Sup'Aéro mis en œuvre
par le CEV, et c'est lui aussi qui a chargé Gilbert Klopfstein du
pilotage de l'avion, des cours et de l'expérimentation.
Le CV91 a été aussi le seul à être officiellement présenté au cours du
voyage du N262 aux USA en 1972.
De nombreux pilotes américains, après une courte familiarisation avec
l'avion et " briefing " sur le collimateur, réussissaient des approches
et atterrissages parfaits dès le premier essai, ce qui a permis de
recueillir des appréciations très élogieuses de la part de pilotes de
compétence indiscutable.

Gilbert Klopfstein (à gauche) et deux des
pilotes d'essais américains après un vol d'évaluation sur le N262 n°55,
Wright Patterson Air Force Base, Ohio, USA, 1972
LE TC 121
A volé pour la première fois en 1971, mais était
encore un appareil expérimental, équipé d'un tube cathodique à haute
brillance au lieu de réticules animés par des servomécanismes. Cela
explique pourquoi, bien qu'installé sur le N262 au cours de la tournée
aux USA il ne pouvait être présenté, du moins officiellement. Il y avait
cependant, en cabine, un écran montrant aux invités ce que l'on voyait
dans ce collimateur. ...et les invités ont vu, eux, et bien mieux
compris que les français l'intérêt de ce qu'on leur a montré.
Depuis, tous les avions de combat US sont pilotés tête haute, avec une
position siège bas pour utiliser en secours la planche classique et bien
sûr, on a tout de même suivi dans l'aviation militaire Française, à
commencer par la marine, pour laquelle la précision de l'appontage est
impérative.
L'IFALPA avait publié une série de besoins opérationnels à remplir par l'instrumentation. le TC121 les satisfaisait tous, à l'exception de l'indication de hauteur et du passage à la " hauteur de décision ".
LE TC125
Il est une évolution du TC121 vers une version
commerciale, mais devait encore être considéré comme prototype, malgré
de grosses améliorations technologiques, et seuls quelques exemplaires
ont été construits. Un mode décollage s'ajoute aux modes croisière et
approche du TC121 et comporte des informations de vitesse-sol et
longueur de piste restante pendant l'accélération, et de guidage pour
rester sur l'axe après la rotation.
Et comme pour le TC121, la pente totale fournit la pente optimum en cas
de panne d'un moteur. Le mode approche a été amélioré par prolongement
de l'axe de la piste synthétique, ajout de repères de seuil décalé, et
d'une indication de vitesse sol et de longueur de piste restante dès
l'arrondi. de plus, s'ajoutant à une nouvelle philosophie de la
fiabilité de l'ensemble, le dessin de la piste synthétique peut être
obtenu par un moyen distinct de l'ILS.
Mais l'appareil restait cohérent et simple. Malheureusement, l'administration qui avait réglementé pour une instrumentation classique en créant une hauteur de décision, et imposé la notion de fenêtres ILS (fenêtres hors desquelles le pilote est en infraction s'il continue à descendre), a voulu ajouter le dessin de ces fenêtres dans le collimateur, plus des symboles classiques ou différents de ceux qui avaient longtemps été étudiés et essayés et bien sûr, le sacro-saint directeur de vol : retour à l'arbre de Noël.....
POURQUOI FAIRE SIMPLE QUAND ON PEUT FAIRE COMPLIQUE ?
RESULTATS
Si nous revenons au TC121 ou à son amélioration
le TC125, on a une grande quantité de rapports et résultats d'essais en
vol, la plupart sur le N262 n°55, mais aussi sur réacteurs, par des
pilotes d'essais, des pilotes de ligne, et même du sénateur Barry M.
Goldwater, au cours de sa visite à Brétigny le 11 juin 1979, du
Committee on Science and Technology, US house of representatives.
Il existe en particulier un rapport de la très respectée et très fermée
" Society of Experimental Test Pilots ", président de l'époque, Chuck
Yeager, qui a fait des essais comparatifs en septembre 1979, avec mesure
des charges de travail par un WAD (Work Assesment Device), entre un
collimateur US équipant un F18 et celui que ces pilotes d'essais ont
spontanément baptisé " KLOPFSEIN DISPLAY ".
Ils ne peuvent pas être taxés de favoritisme en faveur d'un matériel ou
d'idées non US, et ils ont pourtant conclu très nettement en faveur de
ce système Français.
Il est remarquable que presque aucun des pilotes ayant participé aux essais ne connaissaient l'avion, et que la plupart découvraient le pilotage au collimateur.
Néanmoins tous ont reconnu une grande rapidité d'adaptation et la facilité de tenue de pente. De très nombreux atterrissages ont été terminés sous capote, ou quand c'était possible par brouillard, comme ce fut le cas pour Patrick Baudry, avec une VIBAL de 50 m.
Ces résultats indiscutables ont convaincu ceux
qui avaient vraiment besoin d'un tel appareil : les militaires et les
marins aux USA, puis en France, mais les civils n'ont toujours pas
compris quels avantages il pourrait leur apporter, tant sur le plan de
la sécurité des vols que de la rentabilité .
Tous les avions militaires du monde en sont équipés, la navette spatiale
américaine se pose avec, mais pas les civils. ...

Cockpit d'un Gulfstream modifié dont la
place gauche accueille la planche de bord et le HUD de la navette
spatiale américaine reproduits à l'identique pour l'entraînement des
pilotes
Mais Gilbert Klopfstein a été contraint à la retraite, ce qui ne l'empêche pas de poursuivre ses recherches sur la sécurité aérienne, principalement sur ses maigres ressources, mais il a encore des années d'avance en matière de navigation de surface par exemple.
C'est plutôt navrant qu'en France, après les brillants résultats reconnus aussi bien à l'étranger que par les rapports officiels des pilotes d'essais français, on ait voulu " réinventer la roue " en revenant à un " conventional display ", donnant des informations de type classique dans un collimateur. Plus que la complication de cet appareil (tout technicien sait combien il est difficile de parvenir à la simplicité), c'est la conception du pilotage qui est contestable, car basée sur des ordres soi-disant simples à exécuter, le pilote n'ayant plus à comprendre, mais à obéir.
A l'opposé, notre conception consiste à donner dans le collimateur toutes les informations essentielles, et seulement celles-là, sous la forme la plus proche du vol à vue, et donc la plus instinctive, laissant l'esprit libre pour toute décision.
Supposons que l'on figure, à l'infini, un badin. Un index défile devant une échelle (ou une échelle devant un index ... ) et l'index se trouve par exemple devant le chiffre 130. L'avion vole à 130 nœuds. Le cerveau demande à l'œil la position relative de cet index et des chiffres de l'échelle et en déduit une action à entreprendre. Mais si l'index apparaît dans le paysage au sommet de la tour de contrôle cela ne voudra dire en aucune façon que cette tour mesure 130 pieds. Dans la lecture des positions relatives des deux symboles on n'a que faire de la tour de contrôle : on la regarde et on ne la voit pas. Le cerveau n'est pas " demandeur " du monde extérieur et cet anémomètre a empêché le pilote faisant du vol aux instruments de voir dehors. Mais quand un pilote de chasse fait coïncider le point d'impact de ses projectiles avec la position future de sa cible en amenant un symbole convenablement calculé de son collimateur sur la position présente de l'avion hostile, ce symbole n'empêche nullement de voir cet hostile car son cerveau s'intéresse à la fois aux deux objets. Dans le premier cas nous avions affaire à un " head up display " mais pas à un collimateur de pilotage.
En résumé on ne peut pas mettre n'importe quoi dans un collimateur : même par visibilité nulle les symboles doivent inciter le cerveau à chercher le monde extérieur, donc en donner une représentation imagée simple.
Les H.U.D. qui ne respectaient pas ce principe ont été des échecs qui marquent encore la polémique actuelle.
C'est ce qu'avait bien compris le sénateur Barry
M. Goldwater, après sa visite à Brétigny où il avait piloté (en place
gauche s'il vous plaît) le Nord 262 équipé du collimateur TC125.
Il avait parfaitement résumé son avis en écrivant que ce collimateur
permet au pilote : " to act like a manager
rather than a servo "...
Autrement dit de maîtriser la situation, ce qui n'est pas le cas de la conception directeur de vol qui prétend " maintenir le pilote dans la boucle " et réduire sa charge de travail, mais fait exactement le contraire pour avoir le prétexte à imposer les pilotes automatiques hyper sophistiqués, et parvenir enfin à " l'automatisme complet en service courant ".
Le directeur de vol maintient le pilote dans la boucle d'exécution, et non plus dans la boucle de décision.
Pilotes d'aujourd'hui, y êtes vous résignés ?