Massachusetts
Institute of Technology
Charles Stark Draper Laboratory
TO: Distribution
FROM:
Dunbar. C. Collins
SUBJECT: Demonstration
of the French Thomson - CSF, All Weather Approach and Landing Monitor (TC-121)
Heads Up Display
On
September 25, 1972 a technical presentation and flight demonstration of the
subject system was given to interested MIT personnel by Mr. G. Klopfstein,
Engineer in Chief of a technical mission from Ecole Nationale Superieure De L'Aeronautique of France.
The
mission crew has been demonstrating the system in a French Nord
262 twin-engine turbo prop for the past month to pilots/engineers of USAF, FAA,
NASA, Pan American, and the like.
MIT
attendees were:
J. Nevins* C.
Collins* (Pilot A)
I. Johnson* J.
Dunbar* (Pilot B)
M. Connelly* J.
Allen*
G.
Edmonds* B. DeWolf*
A. Chavlagon J.
Sciegienny
N. Polner I.
Levin
*
Participated in flight demonstration
Technical
Presentation (approx. 1 1/2 hours):
Mr.
Klopfstein discussed the systems design philosophy, derived the desired display
parameters and generally described the system’s hardware elements, performance
capabilities and operating techniques. Unfortunately, time did not permit a
detailed technical description or discuss ion of system performance. Mr. Klopfstein
promised that this data would be transmitted to us. When it is it will be
circulated to the interested parties.
This
system presents a novel solution to the problem of displaying to a pilot, in a
simple manner, all the necessary parameters for achieving trajectory control
without exceeding the aircraft operational constraints.
It was
shown that relatively few parameters, i.e., flight path angle, angle of attack
and energy margin indication can provide more useful information than many
parameters normally displayed (pitch attitude, rate of climb, RPM, power ratio,
airspeed, etc.).
The
advantages cited were simplicity and reliability which provide
ease of training, safety during emergencies, improved cruise flight control and
marked improvement in landing performances, i.e., a reduction in landing point
dispersion from 600 meters to 60 meters in evaluation flights by a French test
group.
Manual
control with this system is reported to be as accurate as automatic control in
all weather conditions in cruise, landing or taxi operations.
Some
points resolved in the presentation were:
1. The
primary inputs for trajectory control and energy management can be provided by
a vertical gyro for pitch angle, a local angle of attack sensor (linear
relationship to true a) and vehicle X, Z axis accelerometers. These are the elements of the CV91
visual guidance display. Fig. 1 shows the CV91
“black box”. The system reportedly sells for approx. $10 000.
The VOR-Localizer capture function requires additional ILS inputs, radio
altitude, heading and roll angle which are embodied in the TC121 display.
2. The
system is self corrective for headwind component during final landing approach
but a curved flight path trajectory results. This may be avoided by manual compensation
(holding velocity vector up - runway for headwind) or by setting a console
control to the value of the reported wind to bias the velocity vector marker.
3. Pilot
induced oscillations are minimized in that flight path angle response to pitch
inputs is a smooth first order curve.
4. The
angle of attack display provides much better lift control than that achieved
through an airspeed display. Angle of attack is measured more accurately than
airspeed and also eye discrimination of
1/20° can be attained with the collimated display.
5. Minimum
landing point dispersion and consistent touch-down velocity is best achieved
with a two-slope trajectory, one of 2 – 3° and a final of 0,6 – 1.0°.
Operations
oriented descriptions of the TC
121 and CV9l are contained in the Thomson - CSF brochures available from J. Nevins, Ext. 8-1347. Selected excerpts from these brochures
are attached. A written transcript of the technical presentation has been
promised to MIT.
Flight
Demonstration (approx. 1 1/2 hours):
Two flights
were made to enable the MIT pilots to evaluate the system and to provide a
TV monitor of the TC12l pilots display for a number of observers.
A
20minute warm-up/alignment of the
inertial system was required prior to the first flight and a 1 to 2 minute hold
for realignment during the ramp stop, engines running, between flights.
The
inertial system used for this demonstration is also used in French fighter
aircraft and is classified.
Cockpit
configuration of the system displays included:
a. A
linear scale instrument, located in the cockpit, which displayed flight path
angle and potential flight path angle markers against a calibrated pitch scale.
(fig. 3)
b. A
co-pilot station, glare shield mounted CV 91 visual guidance display (Fig. 3, shown
in retracted position).
The CV 91
is used to facilitate visual approach on runways without glide path facilities.
Symbology:
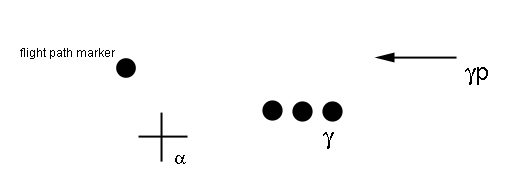
The
flight path marker is manually set to a desired flight path angle by means of a
selector switch on the center console. There were no
angle calibrations on the display, nor horizon. The
size of the cross is a reference value.
c. A
pilot station, overhead-mounted, all weather TC 121 Heads Up
Display. This station was off limits to guest pilots due to possible collision
of HEAD and HUD.
The
procedure followed was to demonstrate the bas ic
concepts of the system on the linear instrument and then to familiarize each
pilot with the control-display response of the CV 91 from the co-pilot' s seat.
The pilot
varied power, lowered flaps, dropped the gear and simulated engine failure to
demonstrate ease of energy management.
In each
case the lowering of gp marker supplied a simple, natural cue for response. i.e.
increase power if available or lower g marker by pitching down until g and gp are aligned. The
MIT pilots easily established
climbs and descents at selected angles and adjusted power accordingly for
energy equilibrium (T = D).
Although
overshoot of power settings was noted on the display the changes in configuration
and trajectory were accomplished with little airspeed variation (1 to 2 knots).
Pilot
induced oscillations appeared minimal.
Control
of velocity vector was simple and positive.
Angle of
attack control by power management was also exercised and found to be easily performed.
The use
of the velocity vector as an aiming device was also demonstrated during a
descent through clouds by pointing it at a hole, and following through. The
same principle can be applied in mountainous terrain.
An ILS
approach and landing on Runway 11 was demonstrated by the pilot. Surface wind
was approx. 240/15 Kt. Subsequent landings by MIT pilots were made on Runway
29.
The
primary pilot tasks were:
1. Accomplish
turn on to final approach
2.
Establish glide path by holding velocity vector on the runway threshold (glide-path
pre-set to 2 ½° )
3. Make
heading corrections to align flight path with runway center
line (strictly visual) .
4. Adjust
power to approx. align gp and velocity vector,
5. Keep
angle of attack within reasonable limits.
6. Cut
power fully at pilots command (approx. 60 ft. altitude) and flare by pitching
up to align velocity vector with far end of runway.
7. Maintain
direction and velocity vector aim point until touchdown.
First
approach (pilot B) was flared too early and touchdown was attempted by the
standard method of “feeling for the runway”. The touch-and-go landing was
completed by the pilot.
Two More
approaches were made with the CV 91 used for both glide path and flare. Both
touchdowns were smooth with landing point as targeted.
Pilot A then
made 4 approaches and landings with consistently good results.
The
system really facilitates the visual approach - there is no unnecessary
jockeying of controls or preoccupation with altitude, airspeed, rate of
descent, power setting, etc.
The aircraft
was very stable.
Crosswind
was no problem.
The CV 91
display brightness was adequate for the variations in background encountered,
mainly cloudy with fair to poor visibility. Brightness is adjustable. The field
of view, a 90 mm pupil, seemed adequate. There was no vibration and no
appreciable obstruction of forward view.
The format
is simple and easy to interpret.
Although
we would have preferred to fly the TC l2l display to view the more complete symbology,
we feel that the CV 91 flight adequately demonstrated the basic concepts.
It is
suggested that altitude below 1000 feet be displayed digitally in 10s of feet
similar to the flight path angle display on the TC121.
In summary,
the system offers a number of advantages. It provides an on-board capability
for making precision (visual) approaches to non-instrumental landing sites.
It provides flight performance cues which do not exist in the ordinary flight
director attitude displays.
It has
particular value for off-nominal flight conditions, i.e. in the event of an
engine failure the pilot has the cues to enable him to immediately assume
the proper pitch attitude which will result in the best engine-out climb speed.
It may have great value in application to the military tactical environment
in a forward area where a minimum amount of navigational and landing aids
would be available, It certainly is an excellent prototype flight test
tool.
Distribution
Attendees
plus
R. Duffy
H. Hagan
N. Sears
H. Trueblood
D. Fraser
P. Felleman
Prof. T.
Sheridan
Prof. P.
Whitaker
Prof. R.
Curry