DES
AVIONS
par
l'ingénieur
en chef de l'Armement KLOPFSTEIN
RECHERCHE DES INFORMATIONS NÉCESSAIRES
L'instrumentation des avions résulte d'une série de
«coups de pouce» faisant appel essentiellement aux progrès de la technologie;
mécanique de précision, électronique et plus récemment de l'informatique. Il
semble néanmoins qu'une étude rationnelle des informations nécessaires à la
conduite d'un aéronef n'ait jamais été effectuée.
Supposons qu'il n'y ait pas d'oiseaux, ni d'insectes
volants dans notre monde, et que l'idée du «plus lourd que l'air» ne soit
apparue que récemment. Que ferait une équipe d'ingénieurs venant de découvrir
la sustentation aérodynamique et construisant le premier «aéronef» pour rendre
cet aéronef « pilotable » par un aéronaute ?
Ils chercheraient, avant d'entreprendre cette étude,
à définir les objectifs. L'objectif essentiel du « pilotage » d'un
aéronef est certainement de pouvoir... l'emmener où l'aéronaute le désire.
Piloter un avion c'est
donc lui faire décrire une trajectoire désirée.
Cette définition étant
acquise il faut donner à cet aéronaute:
- les moyens d'actions
- les informations nécessaires
à l'accomplissement de sa mission.
Commençons par les moyens
d'action.
Pour incurver la trajectoire
d'un mobile il faut créer une force, normale à la trajectoire, dans la
direction où l'on désire l'incurver.
Notre équipe d'ingénieurs, travaillant à la
réalisation du premier « aéronef », arriverait probablement à la
conclusion que pour le vol atmosphérique le meilleur processus consiste à
« orienter » et à « moduler » la force de portance. Le
premier avion aurait donc une gouverne de « variation de portance »,
c'est-à-dire la gouverne de profondeur et une gouverne d'« orientation de
portance », c'est-à-dire la gouverne de roulis.
Il aurait été doté
également d'une gouverne de « contrôle de symétrie d'écoulement »
agissant sur l'équilibre en dérapage, c'est-à-dire la « gouverne de
direction ».
On aurait probablement
trouvé quelque chose d'assez peu différent des conceptions actuelles.
Pour un avion allant
« assez vite » sans servocommandes, on voit difficilement comment ne
pas utiliser les magnifiques propriétés du... levier. D'où le montage d'un...
manche à balai !
Passons aux informations
nécessaires.
Reprenons la définition du
pilotage qui se résume à : « faire décrire à l'avion une trajectoire
prédéterminée ».
Le premier instrument de bord qui viendrait à
l'esprit est... le pare-brise (ne serait-ce que par analogie, pendant la phase
décollage, à la conduite d'une voiture automobile...). Cet instrument peut
paraître inutile ou nuisible dans certains cas : croisière face au soleil,
croisière nocturne, atterrissage par visibilité et plafond nuls. Des gens, à
première vue sensés, ont même essayé de faire un avion dépourvu de pare-brise.
Nous pouvons affirmer que cet instrument est indispensable (même s'il doit
parfois être obturé) ne serait-ce que par les spectacles extraordinaires que
l'on peut y observer. Le moral de l'équipage de conduite étant un facteur
important de sécurité cet instrument doit être conservé chaque fois que cela
est possible.
L'avion devant être emmené
où l'équipage le désire, la première information fournie au pilote aurait été
la trajectoire, c'est-à-dire en toute rigueur : la trace à l'infini de la tangente
à la trajectoire. C'est le vecteur vitesse collimaté.
Nous savons tous qu'un pilote n'a jamais pu obtenir
cette information avec exactitude, il suffit de réduire la poussée sur une mer
de nuages et de se poser la question « où va-t-on rentrer dedans »
pour réaliser à quel point... le pare-brise pouvait paraître inutile car ne
fournissant pas les renseignements demandés.
D'autres exemples illustrent aisément
cette lacune
- arrivée face à une montagne, près du sommet.
L'altimètre, le QNH et la température, ajoutés à l'erreur de statique de
l'avion répondent mieux que l'image extérieure à la question : passe-t-on
dessus ? (Ou pas du tout)
- pilote débutant qui s'aligne convenablement sur une
piste mais se retrouve le plus souvent beaucoup trop « long »
- erreurs graves en approches nocturnes par beau
temps détectées très tard par des pilotes chevronnés lors de l'utilisation de
terrains particuliers (déserts, bords de mer, absence de glide path).
Certains diront : l'aviation a pu exister
jusqu'à nos jours sans cette information. Ceci est heureusement vrai mais la
première cause d'incidents, le plus souvent sans gravité, reste due à des
atterrissages « un peu courts » ou « un peu longs » qui
peuvent évidemment dans la plupart des cas être rattrapés par « un bon
coup de gaz » ou un freinage énergique lorsque d'autres circonstances
aggravantes (gradient de vent important, piste verglacée) ne viennent pas
transformer l'incident en accident.
Notre équipe d'ingénieurs
fournirait donc l'information de trajectoire dans le pare-brise.
L'aérodynamicien de l'équipe ferait alors la remarque
suivante :
« Piloter un avion consiste à amener la
trajectoire sur le point où l'on désire se diriger, mais encore faut-il pouvoir
le faire... ».
Cela signifie en clair que l'avion doit voler et
continuer à voler. La sustentation doit être assurée et pour qu'elle le soit,
il faut que l'écoulement de l'air autour de la structure soit sain. Cette
condition est réalisée, en incompressible, quand l'incidence, c'est-à-dire la
direction d'arrivée de l'écoulement, reste dans des limites précises. Le pilote
doit donc connaître son incidence.
Comment faisait-on jusqu'à présent ? L'équation de
portance d'un avion montre qu'à un facteur de charge donné et à une masse bien
définie une relation « biunivoque » relie l'incidence et l'indication
d'un manomètre différentiel appelé parfois... anémomètre. Cette équation, en
incompressible (aux basses vitesses), ne dépend ni de l'altitude, ni de la
température.
On avait donc un bon « succédané »
d'incidencemètre. Il fallait bien faire attention de ne pas décrocher en virage
trop serré, et de majorer convenablement l'indication de l'instrument quand
l'avion était lourd. Mais dans tous les cas la plus faible vitesse d'atterrissage
est obtenue, compte tenu d'une « garde » raisonnable, pour une
incidence donnée, toujours la même quelles que soient les autres
conditions (altitude, température, masse, facteur de charge). Avec un bon
incidencemètre... l'anémomètre devient inutile en approche.
Ceci ne veut pas dire qu'il faut...
l'enlever !
Quand les « butées » de sécurité sont
représentées par une répartition de pressions qui risquent d'endommager ou de
détruire l'avion, un manomètre différentiel représentant une synthèse de ces
pressions devient indispensable. Il peut être pratique d'ailleurs de le graduer
en... vitesse pour des conditions de pression et de température bien définies.
Mais ceci ne reste qu'une coïncidence (très pratique d'ailleurs...).
Quand ces « butées » sont matérialisées par
l'apparition d'ondes de recompression (ondes de choc), qui peuvent détruire
l'équilibre en tangage de l'avion ou réduire dangereusement les efficacités des
gouvernes, il est indispensable de mesurer à bord de l'avion le paramètre qui
définit l'apparition de ces discontinuités dans l'écoulement. Un machmètre est
absolument nécessaire.
En somme le choix des informations nécessaires ne
doit pas faire appel à la routine, à l'empirisme, au principe d'autorité...
mais à une analyse des objectifs à atteindre et des conditions de sécurité à
respecter.
En ce qui concerne le
pilotage des manettes de puissance, ou de poussée, nous allons effectuer le
même raisonnement.
L'avion (de transport) va
évoluer « presque » tout le temps sur des trajectoires
stabilisées c'est-à-dire :
- trajectoires
sensiblement rectilignes
- virages à taux constant
- montées et descentes
avec maintien d'un ou plusieurs paramètres (incidence, pente)
- descente finale
rectiligne avec augmentation de l'incidence par sauts...
Dans la plupart de ces cas l'équation longitudinale
montre que la poussée doit équilibrer la différence entre la traînée et la
composante du poids le long de la trajectoire.
L'objectif du pilotage de la poussée est
donc son ajustement en fonction de la différence : traînée moins composante du
poids sur la trajectoire.
Or, depuis des dizaines d'années des
ingénieurs s'obstinent à donner aux pilotes... une mauvaise idée de la poussée,
sous forme de débits (et là, ce n'est pas trop mauvais...), de régimes, de
rapports ou de différences de pressions, de températures diverses et variées,
et même de surfaces (position des tuyères lorsque la section de sortie varie,
par exemple). Tous ces paramètres sont des paramètres de sécurité : un régime
trop important peut amener un fluage des aubes ou un éclatement du disque de
turbine, une température trop élevée devant turbine... les mêmes phénomènes ;
un débit trop grand peut amener une charge trop importante sur le compresseur,
un ensemble de paramètres peut amener autour d'une aube de compresseur un
écoulement incompatible avec son « aérodynamique » : décrochage de
compressibilité.
Le fait de rester, en
considérant un espace à n dimensions, dans un « volume » déterminé
représentant le «domaine» de fonctionnement correct du moteur correspond aux
« butées » rencontrées dans le vol de l'avion.
Mais il faut en restant
entre ces « butées » pouvoir ajuster la position des manettes en
fonction du besoin de l'avion, c'est-à-dire de la différence entre la
traînée et la composante du poids.
Un exemple fera mieux
comprendre cette analyse de l'objectif : supposons un avion dont le pilote
désire voler en palier (composante de poids nulle) à incidence constante (donc
vitesse constante...). L'ajustement des commandes de puissance doit conduire à
une poussée égale à la traînée.
Si l'on sort le train tout
en désirant conserver la même altitude et la même vitesse, il faut augmenter la
poussée...
Si l'on se met en virage
une augmentation de poussée doit compenser l'augmentation de traînée due à la traînée
induite.
En résumé en conservant
altitude et vitesse constantes il faut, suivant les cas (train haut ou bas) et
suivant les taux de virage, des poussées toujours différentes... mais toujours
une différence poussée moins traînée nulle.
Un pilote disposant d'un
indicateur de poussée parfait (un mythe... d'ailleurs) devrait donc se souvenir
dans tous les cas de la poussée nécessaire.
S'il dispose d'un
indicateur de « poussée moins traînée » il suffit qu'il se souvienne
du chiffre... zéro, dans tous les cas.
Résumons ce premier
chapitre : Piloter un avion, c'est l'emmener où l'on désire, donc l'information
nécessaire est la trajectoire.
La condition de sécurité
est, au décollage et à l'atterrissage, de conserver un écoulement sain autour
de la structure, donc l'information nécessaire est l'incidence. L'ajustement
des manettes doit être effectué en fonction de la différence entre la traînée
et la composante du poids, qu'il faut donc fournir au pilote. Les conditions de
sécurité sont données par un contrôle correct des « paramètres moteurs ».
Dans ce dernier cas on
omet volontairement les problèmes de navigation et rayon d'action où les
débitmètres, jaugeurs et... la montre sont évidemment bien utiles...
DÉFINITION ET ÉLABORATION DE CES INFORMATIONS
Sans revenir sur les études et expériences qui
conduisirent aux résultats, on peut retenir que l'idée de base a été de
présenter sous forme simple et intuitive les deux informations de base,
trajectoire et incidence, à l'aide d'un seul réticule mobile. On utilise le
théorème simple suivant :
« Le vecteur vitesse de
l'avion par rapport à la masse d'air est égal et opposé à celui de la masse
d'air par rapport à l'avion... ».
En termes plus imagés,
mais plus parlants :
« L'avion avance dans
l'atmosphère dans la direction d'où lui parviennent les molécules d'air... ».
Si donc on « peint en
rouge » la molécule d'air qui arriverait de l'infini dans l'oeil du
pilote (sans tenir compte de la déflexion du capot bien entendu...) ce point
rouge représentera :
- la position future de l'avion s'il n'incurve pas sa
trajectoire (tangente à la trajectoire), si l'on considère la position de ce
point rouge dans le paysage...
- la direction d'arrivée des molécules d'air, si l'on
considère la position de ce point par rapport à l'axe longitudinal de l'avion,
donc par définition l'incidence.
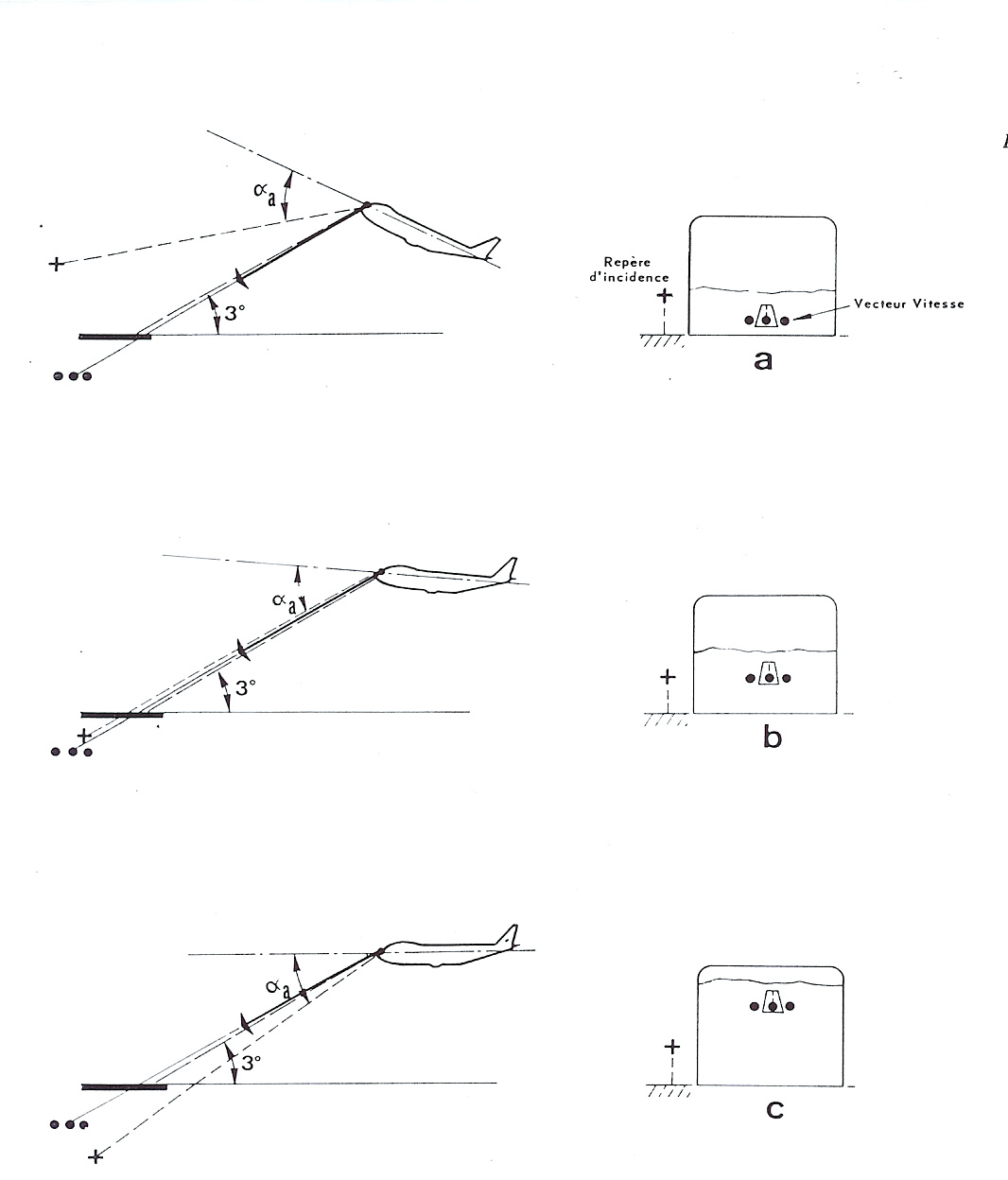
La Figure 1 fait
comprendre ce principe.
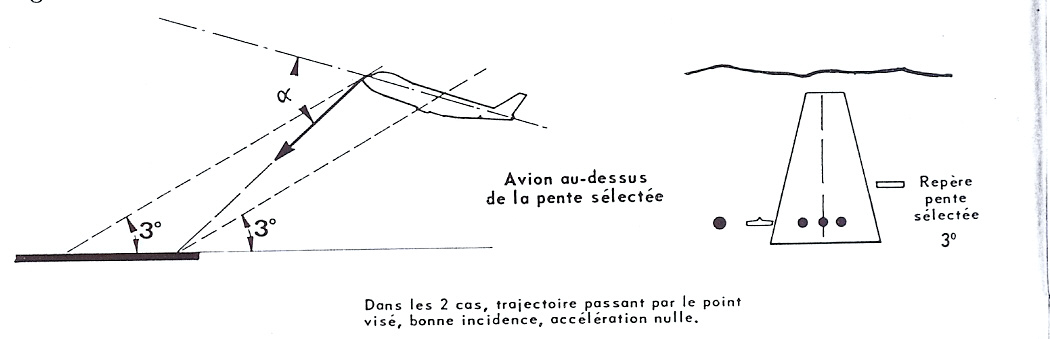
Dans les 3 cas l'avion
- est dans un plan de
descente correct (3° par exemple)
- a sa trajectoire
orientée dans ce plan de descente (donc rejoint l'entrée de piste) donc dans
les 3 cas le repère de trajectoire se trouve sur l'entrée de piste, elle-même
située 3° sous la ligne d'horizon.
Les 3 images du monde
extérieur a, b et c sont donc identiques. En effet
si on enlève l'avion, les 3 images sont les mêmes.
Par contre dans le cas a,
l'avion va trop doucement, il est donc trop cabré. La piste et le repère de
trajectoire sont très bas dans le pare-brise.
En b, tout est correct, en
c, l'avion va trop vite, son incidence est trop faible, toute l'image est en
haut du pare-brise.
Si donc on matérialise, par une croix par exemple, une
direction fixe par rapport à ['avion, représentant géométriquement la bonne
incidence d'approche aa (avec la « garde » raisonnable) l'ensemble
réticule mobile (points rouges) et croix fixe donne les 2 informations
souhaitées :
- Trajectoire
- Incidence
Les points rouges,
observés par rapport au « monde extérieur » donnent le « point
d'impact futur ».
S'ils se trouvent
au-dessous de la croix fixe les molécules d'air arrivent de trop bas... l'incidence
est trop grande.
S'ils se trouvent
au-dessus, l'incidence est trop faible. La coïncidence assure à la plus basse
vitesse d'atterrissage un écoulement correct avec une marge « certifiable ».
Pour actionner ce réticule
il suffit d'une simple sonde d'incidence.
Sans rentrer dans les
détails il suffit de retenir que la mesure de l'incidence sur un avion est au
moins aussi simple et fiable que celle de la pression statique, elle est même
théoriquement moins sensible à l'implantation de la sonde.
La relation incidence
locale, mesurée par la sonde (pratiquement n'importe où sur l'avion...)
incidence fuselage, est linéaire pour une configuration et un nombre de mach
donné. Le seul inconvénient réside dans le fait que, si l'on veut étendre le
système dans tout le domaine avion, il faut une correction de la loi en
fonction du nombre de mach. Lorsque cette loi est établie, il suffit de
positionner un réticule sur l'incidence fuselage à l'échelle 1.
Ceci est impératif, un changement
d'échelle ferait perdre l'information de trajectoire. L'information nécessaire
au pilotage des moteurs est donnée aisément en mesurant à bord de l'avion la
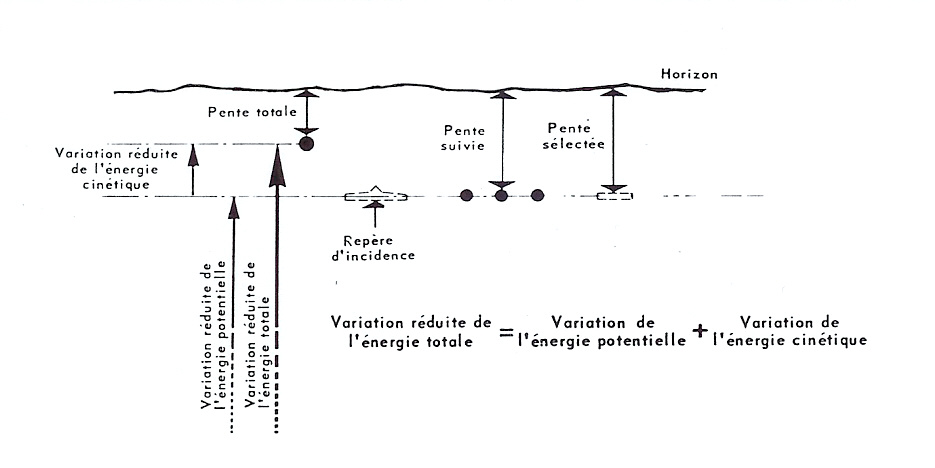
« variation réduite de la hauteur totale ».
Si un avion est à une
altitude z, son énergie potentielle est mg z. Son énergie cinétique est, à la
vitesse V, 1/2 mV².
On appelle énergie
totale la somme :
E
= mg z + 1/2 mV²
La quantité E/mg = z + V²/2g est homogène
à une hauteur ; on l'appelle hauteur totale H.
Cela signifie qu'un avion volant à 1000 m d'altitude
à 200 m/s « peut » théoriquement monter en plané à :
1000 + (200)²/(2x9,81) = 1000
+ 2000 = 3000 m
La dérivée de la hauteur totale est :
H'
= z' + V.V'/g
On divise par la vitesse pour avoir un
nombre sans dimension. La dérivée réduite est donc :
H'/V = z’/V + V’/g
Le premier terme z’/V
représente le sinus de la pente g
Le second terme V’/g l'accélération sur la trajectoire
exprimée en unités « g ».
C'est cette quantité H’/V, variation
réduite de la hauteur totale, qu'on appelle pente totale, et quelquefois,
improprement, pente potentielle.
Cette relation signifie simplement que la variation
réduite d'énergie totale est représentée par la somme de la pente (qui
représente la dérivée réduite de l'énergie potentielle) et de l'accélération
sur trajectoire (qui représente la dérivée réduite de l'énergie cinétique).
En effet, quand la pente
est positive, l'avion monte, donc son énergie potentielle augmente et vice
versa.
Quand il accélère sur sa
trajectoire, sa vitesse augmente, donc son énergie cinétique augmente et vice
versa.
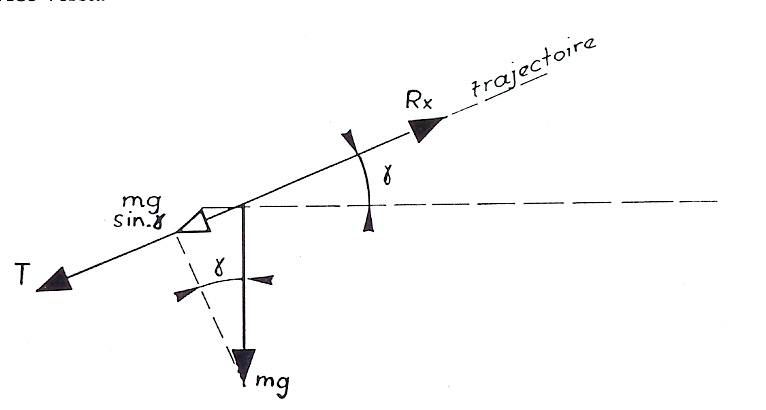
De l’équation générale du vol :
![]()
On tire :
![]()
(T
– Rx)/mg = H’/V
La pente totale est donc l'expression de l'excédent
(ou de l'insuffisance) de la poussée sur la traînée.
La valeur ![]() peut
être mesurée par un accéléromètre calé en permanence selon la trajectoire dont
on relèverait l'indication brute (non corrigée de la pesanteur afin de
conserver le terme sing).
peut
être mesurée par un accéléromètre calé en permanence selon la trajectoire dont
on relèverait l'indication brute (non corrigée de la pesanteur afin de
conserver le terme sing).
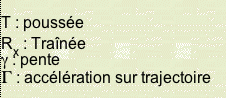
Pour plus de facilité, on préfère en général disposer
de deux accéléromètres fixes, calés selon l'axe avion et selon l'axe perpendiculaire
situé dans le plan de symétrie de l'avion. Leurs indications brutes (non corrigées
de la pesanteur) Jx et Jz sont introduites dans un petit calculateur pour fournir
la valeur Jx cos a - Jz sin a (a = incidence
fuselage) qui représente la projection sur la trajectoire de ces accélérations,
donc comme précédemment :
la valeur
![]()
Si on ajoute au vecteur vitesse dans le pare-brise,
qui est en fait un indicateur de pente, un réticule donnant la pente totale, la
distance de ce dernier réticule au premier donne une image intuitive de
l'accélération sur trajectoire.
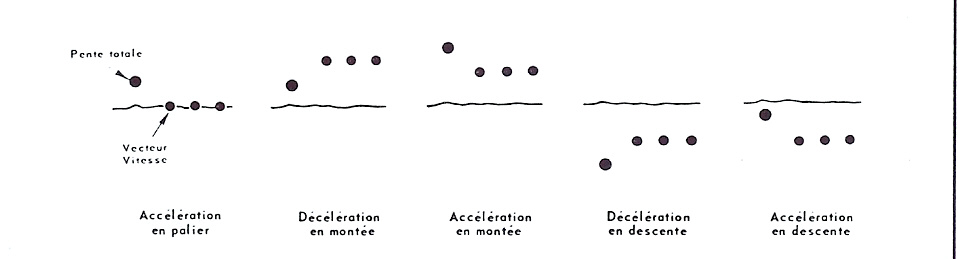
Quand le réticule représentant la pente totale est
au-dessus des 3 points rouges représentant le vecteur vitesse, il y a trop de
poussée pour équilibrer le vol : l'avion accélère. Quand il est au-dessous des
3 points rouges, il n'y a pas assez de poussée : l'avion décélère.
Le réticule pente totale
est pilotable avec la manette de poussée (terme T). Il est évidemment « influençable »
par toute variation de traînée (sortie de train, changement de vitesse ou de
configuration etc. : terme Rx) mais ceci
est un AVANTAGE.
Ce dernier système est
infiniment meilleur que les indicateurs « Fast-Slow »
que l'on trouve parfois, car il indique une variation d'incidence qui va se
produire et non pas un petit écart.
Il faut évidemment
corriger en disant :
Accélération = diminution
d'incidence en trajectoire stabilisée; décélération = augmentation d'incidence.
mais l'accoutumance est immédiate.
Ce système est finalement très simple, donc fiable et
peu onéreux. Un seul inconvénient résulte du fait que le positionnement du
réticule « pente totale » doit se faire à partir de l'horizon. Il est
donc entaché (et ce n'est pas le cas du vecteur vitesse) de l'erreur de
verticale.
UTILISATION DES INFORMATIONS - PRÉCISIONS OBTENUES
L'utilisation du repère de trajectoire est évidente.
Une étude théorique montre que la pilotabilité du réticule en utilisant la
commande de profondeur est très voisine de celle de l'attitude (ceci grâce au
filtrage de turbulence qui est effectué par rapport à l'axe de l'avion).
La précision obtenue est de l'ordre du dixième de
degré en atmosphère calme, du demi degré en turbulence moyenne. Elle dépend
évidemment du type d'avion. Des erreurs erratiques du demi degré n'influent
absolument pas sur la trajectoire obtenue car leur valeur moyenne est nulle et
la trajectoire est l'« intégrale » de la vitesse, donc en fait une
« moyenne ».
Une erreur systématique
provient du vent, qui fait que la trajectoire sol n'est pas la trajectoire «air ».
Le vent introduit une
« dérive verticale » qui fait que si l'on vise un point d'une piste
avec le vecteur vitesse air, on le rejoint en décrivant une sorte de « courbe
du chien » très voisine de la ligne droite.
La « flèche » de cette courbe du chien est
faible, cela tient à ce que la route (en fait le plan de descente) fait un
angle très faible avec le vent : en effet près du sol le vent est toujours
horizontal, et le plan de descente ne fait au maximum que 3 ou 4 degrés avec
l'horizontale, la dérive est donc très réduite.
Mais l'impression visuelle de « creusement »
est néanmoins forte : quand on est 10 pieds en dessous du plan de descente à 200
mètres du point visé sur la piste, la ligne de visée fait un angle avec
l'horizontale de près de 30 % de moins que l'angle de descente normal.
L'impression d'aplatissement est donc très accentuée en courte finale bien que
l'enfoncement par rapport au plan de descente théorique soit très faible.
Comme cette dérive est aisée à corriger, il est
peut-être plus logique d'effectuer une correction résultant d'une formule
simple - Figure 6 -
correction = pente de descente choisie x (Vitesse du vent / Vitesse avion)
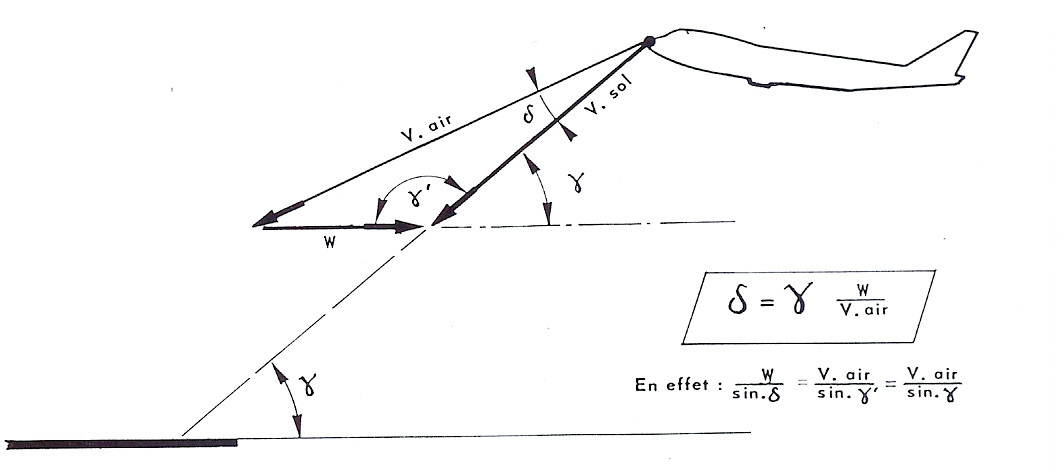
Cette correction peut être
introduite aisément dans le réticule du collimateur.
On pourrait évidemment
donner la trajectoire sol, mais cette information nécessite une élaboration
compliquée, donc chère et peu fiable, en plus elle ne permet pas :
- la matérialisation de
l'incidence
- l'arrondi et l'impact.
Dans tous les cas, la
correction doit être négligée en courte finale, la flèche est alors
imperceptible si l'on part du plan de descente correct.
L'utilisation de l'information incidence et du
variomètre d'énergie totale est extrêmement simple : sur une pente donnée,
l'index de pente totale doit être au-dessus de la trajectoire (accélération) si
l'incidence est trop grande, en dessous dans le cas contraire. Quand
l'incidence est correcte on le positionne avec les manettes de poussée en face
du vecteur vitesse.
On peut dire que l'index
de dérivée d'énergie totale « aspire » le vecteur vitesse dans des
axes liés à l'avion.
Lorsque la poussée n'est
plus pilotable (panne de moteur en montée par exemple), on agit évidemment sur
la pente de trajectoire pour communiquer à l'avion des accélérations si
l'incidence est trop grande.
Lorsqu'on se trouve à la
bonne incidence, le repère de variation d'énergie totale figure la pente
maximum sur la poussée restante.
Dans des conditions
normales la règle de pilotage est la suivante :
- affichage du réticule trajectoire sur un point sol
ou sur un repère de pente
- modulation de la poussée, à l'aide de l'index
d'énergie pour assurer une incidence correcte.
Dans l'ordre : trajectoire,
incidence, énergie totale.
En panne de moteur :
- Recherche de l'incidence
optimale par action sur la trajectoire relativement à l'index d'énergie.
- Action sur la
trajectoire pour afficher l'angle de montée maximum.
L'assiette de tangage n'est
plus pilotée ! En fait son pilotage est inutile :
- parce que les objectifs
du pilotage que nous avons définis ne l'utilisent pas
- parce qu'en fait étant
la somme de la pente de la trajectoire et de l'incidence elle sera mieux...
pilotée que quand on l'utilisait !
Cette dernière relation
montre que l'information d'attitude créait une redondance inutile qui
compliquait le travail du pilote.
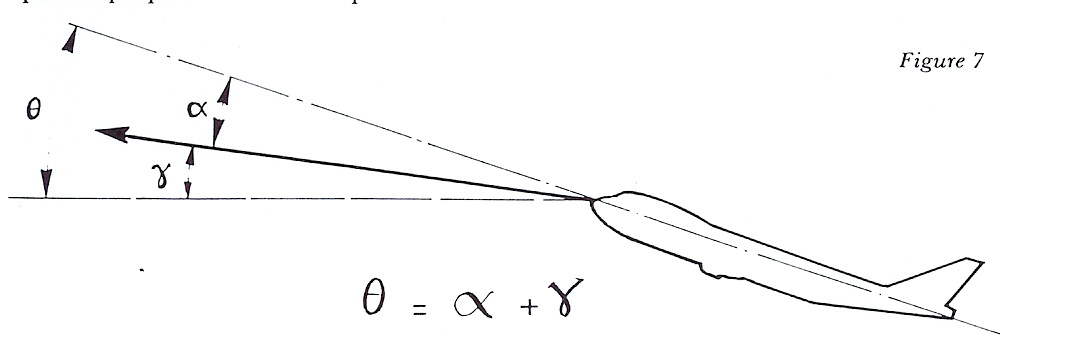
En effet l'attitude Q (têta) étant
égale à la pente G (gamma) plus a (alpha) , on voit qu'il est strictement impossible d'« afficher »
a priori une attitude, un « badin », donc une incidence et d'avoir en
même temps une pente g convenable puisque la pente va résulter des valeurs
de Q (têta) et de a (alpha).
Or g est un objectif, a une condition de sécurité, on ne peut supprimer que Q (têta).
Il faut évidemment conserver de (très) bonnes
références de verticale dans les avions, elles sont nécessaires pour mesurer,
avec le vecteur vitesse, la pente de la trajectoire. Le vecteur vitesse étant
obtenu au 1/10è de degré, on voit que des
progrès restent à faire (hormis l'inertie) dans les gyros de verticale...
L'arrondi et l'impact deviennent des opérations très
méthodiques : la phase finale de l'atterrissage consiste à infléchir la
trajectoire pour lui donner une pente qui conduit à une vitesse verticale
compatible avec les limites structurales et le confort des passagers. Cette
pente se trouve être de 0,6 à 1° pour la plupart des avions.
A une altitude prédéterminée il suffit donc
d'afficher cette pente, de la maintenir et d'attendre le sol.
Cette manœuvre n'a aucun rapport avec la méthode
préconisée par certains pilotes acrobates qui prétendaient pouvoir afficher
une... attitude et attendre le sol. Ils oubliaient que 3 à 5 nœuds de moins que
l'indication... coutumière pouvaient conduire à une incidence de 1° plus forte
(à même attitude évidemment) donc à une pente de trajectoire de 1° plus forte.
Donc finalement à une vitesse verticale à l'impact... double !
En fait ils ne maintenaient pas l'assiette mais lui
donnaient inconsciemment un « petit coup à cabré » avant le sol..,
L'intérêt du vecteur vitesse air est très important
en gradient de vent. La constance de la « visée » amène le pilote à
effectuer sans s'en apercevoir l'incurvation de trajectoire « air » corrigeant
exactement l'enfoncement dû au gradient. S'il est attentif à son paramètre de sécurité
: l'incidence (qu'il a sous les yeux puisque le même réticule est utilisé...),
il observera simultanément une augmentation d'incidence qu'il corrigera
aisément par action immédiate sur la poussée.
Il est intéressant de noter qu'aucune procédure
spéciale n'est à envisager. Un repère de pente, matérialisant un « site »
déterminé par rapport à l'horizon est le complément indispensable des
informations décrites.
Les Figures 8 et 9 donnent des exemples
d'utilisation.
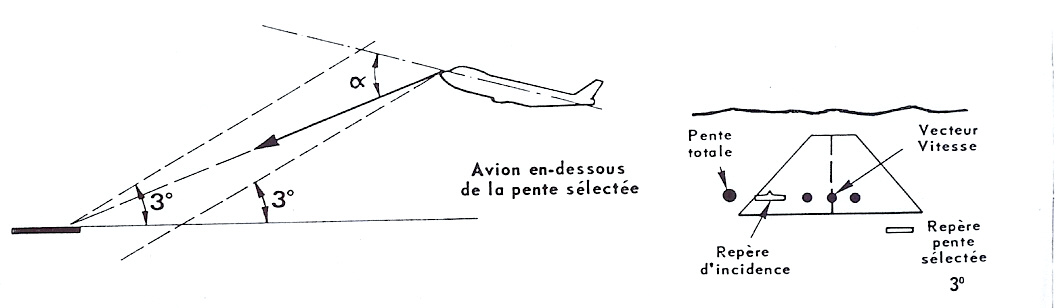
Figure 8 - l'avion est en descente équilibrée à la
bonne incidence, mais en dessous du plan de descente choisi.
Le vecteur vitesse étant au-dessus du repère de
pente, la pente est plus faible que la valeur normale. L'entrée de piste
apparaît donc évidemment au-dessus du repère de pente.
Figure 9 - L'avion est stabilisé au-dessus du plan de
descente choisi.
HISTORIQUE DES ESSAIS EFFECTUÉS
La première expérience a été réalisée sur simulateur
en utilisant un collimateur électromécanique (CSF 200) qui représentait une
piste, Ce collimateur avait volé, sans vecteur vitesse, et la coïncidence entre
la piste réelle et la piste synthétique avait été obtenue en vol. Sur
simulateur, le vecteur vitesse permettait d'aller à l'impact en utilisant
uniquement le collimateur.
La première étude en vol fut effectuée en utilisant
un collimateur rustique, bricolé, dont la pupille n'excédait pas 45 mm !
L'avion était le Mirage III B à stabilité variable qui, malheureusement, ne
peut être « posé » par le pilote en place avant qu'en « détresse »
uniquement (pilotage électrique simple chaîne).
Les approches, exécutées
jusqu'à 150 pieds, montraient un « bond » dans la précision du pilotage.
Les écarts anémométriques et les écarts d'assiette étaient réduits dans un rapport
3 à 4, ces deux paramètres n'étant plus pilotés. Ceci se passait en 1968.
Ces résultats
permirent la construction d'un collimateur simplifié (un diamant mobile, un
trait fixe) mais de bonne qualité qui fut avionné sur un Mirage III B de série.
Celui-ci pouvait être alors posé par le pilote qui disposait du
collimateur.
Une expérimentation officielle par le
Centre d'Essais en Vol suivit l'expérimentation initiale de l'auteur. Elle
permit à une trentaine de pilotes de réaliser plus de quatre cents
atterrissages, dont 30 de nuit, dans des conditions de répétitivité jamais
obtenues à ce jour : des pilotes familiarisés avec le nouveau type de pilotage
« touchaient » la piste avec des écarts anémométriques de quelques
nœuds, avec une dispersion longitudinale de l'ordre de cent mètres et
avec une dispersion de vitesse verticale à l'impact inconnue jusqu'à ce jour.
Cette première
expérimentation a conduit l'Aéronautique Navale à envisager la modification de
ses chasseurs embarqués.
Dès 1969, les
premiers pilotes de ligne ont pris contact avec ce système. Ces vols d'informations
ont conduit l’OCV à émettre un « vœu » sur la poursuite de cette
expérimentation dans l'aviation commerciale.
Le premier
collimateur « bricolé » fut monté ensuite sur le Nord 262 de l'Ecole
Nationale Supérieure de l'Aéronautique et des contacts furent pris avec la
Direction des Opérations aériennes d'Air France.
Ces contacts
permirent au Département Etudes de lancer l'expérimentation du vecteur vitesse
en utilisant une extrapolation d'un matériel commercial existant, en fait mal
adapté à ce genre de figuration (voir chapitre suivant).
Mais l'auteur tient à
rappeler qu'à l'époque il n'y avait... rien d'autre! Et que c'est grâce à
l'intérêt porté par la Compagnie à ces études qu'il a pu obtenir les crédits
nécessaires à la réalisation de 2 matériels expérimentaux de technologie
complètement nouvelle, parfaitement adaptés à la présentation de ces
informations et qui représentent en fait les « prototypes » des
collimateurs à vecteur vitesse et énergie totale qui devraient être utilisés
dans l'aviation commerciale d'ici quelques années.
Pour mémoire il faut citer une
expérimentation menée par l'UTA qui a comparé un matériel américain utilisant
une approximation de la trajectoire « sol » et un matériel français
capable de vecteur vitesse air et d'énergie totale.
Malgré la technologie déjà ancienne et l'encombrement
du matériel français l'expérimentation se poursuit avec ce dernier matériel.
Le variomètre d'énergie totale vole depuis plus d'un
an sur le N.262 de l'ENSA ; la simplicité de l'interprétation des
renseignements fournis a entraîné une approbation unanime de la part de tous
les pilotes qui l'ont utilisé, civils et militaires.
Les deux prototypes de collimateur mentionnés plus
haut consistent:
- d'une part en un collimateur «VMC » de faible
encombrement, comportant uniquement vecteur vitesse (et incidence) et énergie
totale. La technologie est extrêmement simple et fiable.
- d'autre part en un matériel « tout temps »
à tube cathodique représentant en plus une piste collimatée.
Le premier collimateur en version «préindustrielle»
devrait être expérimenté en ligne en 1972.
Le second a donné des résultats dépassant les
prévisions les plus optimistes : le Nord 262 peut être posé à la main, sous
capote, dans des conditions où aucun système automatique ne peut être envisagé
aujourd'hui pour effectuer le même travail. De nombreux atterrissages ont en
effet été réalisés par des vents arrières de plus de
30 nœuds dans des conditions de turbulence où l'embrayage d'un PA sur les
seules surveillances gyroscopiques ne « tient » pas.
Ce collimateur vole depuis
avril 1971, le premier atterrissage sous capote a été réalisé au quatrième vol.
En janvier 1972 ce
matériel, bien qu'à l'état de maquette de laboratoire, a réalisé plus de 250
heures de vol pratiquement sans panne. Plus de 150 atterrissages sous capote
ont été réalisés, 18 en conditions CAT III réelles.
Il faut mentionner que
plus de 30 % des atterrissages sous capote ont été réalisés par des pilotes de
ligne après une heure de « briefing » et trois quarts d’heure
d'accoutumance à ce mode de pilotage.
Cette expérience, réalisée avec une majorité de
pilotes de la Compagnie Air France est certainement unique dans les annales de
l'instrumentation des avions car elle a pu être terminée moins de 9 mois après
le premier vol !
« ERGONOMIE » DU COLLIMATEUR
En fait, quelques « réticences »
subsistent. Elles sont inévitables... et peu nombreuses. Elles tiennent
certainement au fait que jusqu'à présent ce que l'on appelait « Head Up
Display » consistait essentiellement à encombrer le pare-brise... avec la
planche de bord, c'est-à-dire avec des cadrans, des échelles, des index, des
chiffres etc.
Les inconvénients étaient de deux sortes :
- ces informations n'étaient pas « liées »
au monde extérieur. Par exemple si un chiffre 60 était superposé au sommet de
la tour de contrôle cela ne signifiait nullement que cette tour avait 60 pieds
de haut... le pilote lisait peut-être une hauteur de 60 pieds en face d'un
repère mais alors il ne « voyait » plus la tour de contrôle. On avait
supprimé le pare-brise ! (Voir plus haut).
- ces informations étaient liées à l'avion, par
exemple une rose des caps se trouvait toujours au même endroit dans le champ du
collimateur. Lorsque le pilote lisait le cap, la direction de son regard était
donc fixe par rapport aux repères liés à l'avion. Or tout le système oculomoteur
de l'œil humain est conçu pour que ce « capteur » puisse rester fixé
sur un objet quelconque malgré les mouvements du corps et de la tête. Il vaut
donc mieux, en turbulence, regarder « dehors »... que lire un livre
que l'on tient dans les mains, qu'un tableau de bord, ou qu'un mauvais
collimateur !
Le vecteur vitesse, la piste synthétique, sont
typiquement des informations parfaitement adaptées à une superposition au monde
extérieur dans le pare-brise, les deux inconvénients cités plus haut
disparaissent.
CONCLUSIONS
L'auteur tient à remercier la Direction des Opérations qui lui a permis d'exprimer son point de vue dans ces quelques lignes. Une expérimentation en ligne va commencer sur un B 747 de la Compagnie Nationale Air France.
Cette procédure pourrait d'ailleurs être dangereuse.
Dans le cas de pilotage automatique les systèmes décrits fournissent avant tout des informations de contrôle global immédiat, plus directement assimilables que celles fournies par les instruments de position actuels qui nécessitent une synthèse.
Malgré des défauts de jeunesse un effort doit être tenté pour l'adoption de ces idées nouvelles car les essais effectués ont montré qu'elles conduisent à une plus grande maîtrise de l'avion.